

Радиоуправляемая лодка – сложное, но достижимое инженерное решение, которое можно собрать без профессионального оборудования. Для сборки потребуется базовый набор компонентов: корпус, электродвигатель мощностью от 150 Вт, электронный регулятор скорости, приемник и пульт управления с частотой 2,4 ГГц. Корпус лучше выбирать из водостойких материалов, таких как стеклопластик или влагостойкая фанера толщиной не менее 6 мм.
Эффективность лодки напрямую зависит от правильного подбора и настройки винта. Оптимальным будет трехлопастной винт диаметром 50–70 мм с шагом, соответствующим скорости вращения двигателя – обычно 2500–3000 об/мин. Для питания рекомендуется использовать Li-Po аккумуляторы емкостью не менее 3000 мАч с напряжением 7,4 В, что обеспечит непрерывную работу около 20 минут при полной нагрузке.
Для устойчивого управления важна точная установка рулевого механизма с шагом от 20 до 30 градусов и минимальным люфтом. Рекомендуется использовать сервопривод с усилием не менее 3 кг/см. Сборка и пайка всех электрических соединений должна проводиться с использованием термоусадочных трубок и надежной изоляции для предотвращения попадания влаги и коротких замыканий.
Выбор и подготовка корпуса для радиоуправляемой лодки

Корпус – ключевой элемент, определяющий устойчивость и управляемость модели. Для радиоуправляемой лодки оптимальны корпуса из легких, прочных материалов: пластика (ABS, полипропилен), пенопласта высокой плотности или влагостойкой фанеры толщиной 4–6 мм. Толщина материала должна обеспечивать жесткость без лишнего веса.
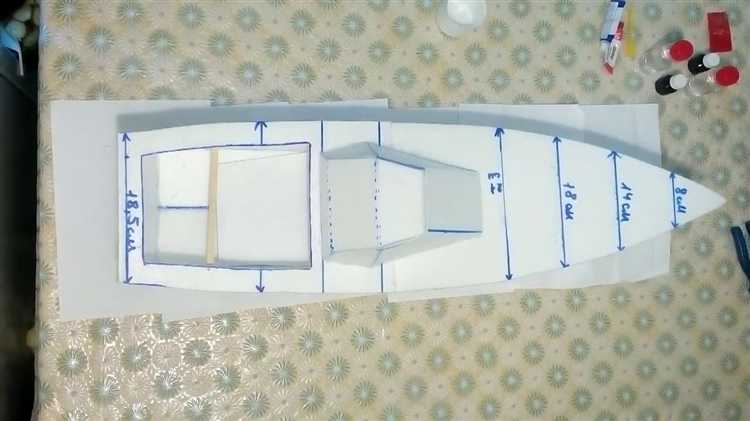
Форма корпуса зависит от назначения: для скорости выбирают узкий обтекаемый V-образный корпус с углом киля 20–30°, для стабильности – плоскодонный или с небольшим V. Глубина корпуса в средней части должна быть не менее 50 мм, чтобы разместить электронику и обеспечить плавучесть с запасом не менее 20% от общего веса.
Перед сборкой поверхность корпуса тщательно обезжиривают спиртом или ацетоном, удаляют заусенцы и неровности шлифовальной бумагой зернистостью 320–400. Если корпус из фанеры, рекомендуется обработать все срезы и внутренние поверхности влагозащитным составом на основе эпоксидной смолы, чтобы предотвратить разбухание и разрушение.
Для улучшения гидродинамики и защиты корпуса применяют нанесение двух-трёх слоев яхтенного лака или специализированной гидроизоляционной краски с промежуточной шлифовкой. Для пластиковых корпусов достаточно обработки мелкой абразивной губкой и нанесения полировочного состава.
В местах крепления двигателя и рулевого механизма необходимо усилить корпус накладками из тонкого алюминия или стеклоткани с эпоксидной смолой, чтобы избежать деформаций и повысить долговечность конструкции.
Подбор и установка электродвигателя для лодки

Выбор электродвигателя зависит от размера лодки и требуемой скорости. Для моделей длиной до 60 см оптимален бесколлекторный двигатель мощностью 100–150 Вт с напряжением 7,4–11,1 В (2-3 LiPo аккумулятора). Для лодок длиной 80–120 см подойдет двигатель мощностью 200–300 Вт при 11,1–14,8 В.
При выборе мотора обращайте внимание на KV (обороты на вольт) – для лодок обычно подходят двигатели с KV от 800 до 1200. Высокий KV повышает скорость вращения винта, но снижает тягу. Для балансировки мощности и управляемости выбирайте винт диаметром 40–50 мм и шагом 45–60 мм.
Установка начинается с крепления мотора на мотораму. Оптимальный материал – алюминий толщиной 3–5 мм или пластик высокой прочности. Крепление должно обеспечивать жесткость и возможность регулировки угла наклона, чтобы добиться максимальной эффективности хода.
Для снижения вибраций используйте резиновые прокладки или демпферы между мотором и рамой. Подключение к регулятору скорости (ESC) должно обеспечивать защиту от перегрева и короткого замыкания. ESC выбирайте с номиналом тока минимум на 20% выше тока двигателя.
Перед окончательной установкой протестируйте двигатель на стенде с винтом для определения тока и температуры в рабочих условиях. Важно контролировать нагрев мотора и ESC – превышение температуры выше 70 °C ведет к снижению срока службы компонентов.
Проводка должна быть короткой и качественной, с сечением не менее 14 AWG для минимизации потерь. Разместите аккумулятор и ESC так, чтобы обеспечить баланс лодки по центру тяжести и удобство доступа для обслуживания.
Выбор и настройка радиоаппаратуры управления

Для управления радиоуправляемой лодкой необходимы радиоаппаратура с частотой 2.4 ГГц и минимальным числом каналов – 2 (рулевое управление и двигатель). Рекомендуется использовать проверенные модели с поддержкой протокола DSMX или FHSS для снижения помех. Диапазон действия должен быть не менее 200 метров для свободного маневрирования на воде.
При выборе приемника обратите внимание на совместимость с передатчиком и компактность устройства, чтобы легко разместить его в корпусе лодки. Оптимальный вес приемника – до 15 грамм. Убедитесь, что в приемнике есть встроенный стабилизатор напряжения или используйте внешний регулятор для подачи стабильного питания от аккумулятора.
Настройка передатчика начинается с проверки частоты и калибровки стиков. Калибровку лучше проводить на земле, установив крайние положения стиков, чтобы обеспечить полный диапазон управления. Для двигателя настройте бесщеточный регулятор скорости (ESC) с функцией тормоза, что обеспечит точный контроль ускорения и плавное замедление.
Рулевая серво-машинка должна иметь момент не менее 3 кг*см и скорость не более 0,12 сек/60°, чтобы избежать рывков и обеспечить стабильное управление курсом. При настройке конечных точек сервопривода выставьте максимальный угол поворота в пределах 45–50° для предотвращения механического повреждения рулевого механизма.
Обязательно проведите тестовую проверку на воде, убедившись в отсутствии помех, корректности отклика стиков и устойчивости сигнала. При возникновении задержек или потери связи стоит проверить целостность антенн и заменить элементы с изношенными контактами.
Изготовление и монтаж рулевого механизма

Рулевой механизм радиоуправляемой лодки состоит из сервопривода, рулевого вала и руля. Для изготовления конструкции понадобится прочный пластик (например, ацетат), алюминиевая проволока диаметром 2–3 мм и крепежные элементы.
- Изготовление рулевого вала:
- Отрежьте алюминиевую проволоку длиной 10–15 см, в зависимости от размера корпуса.
- С одного конца сделайте загиб под прямым углом длиной 2–3 см для крепления к рулю.
- Другой конец подготовьте под крепление к сервоприводу: сверлите или надфилем сформируйте плоскую часть для надежной фиксации.
- Изготовление руля:
- Вырежьте из пластика прямоугольник 40×20 мм, толщиной 2–3 мм.
- Сделайте в центре отверстие диаметром 3–4 мм для посадки на рулевой вал.
- Закруглите края для уменьшения сопротивления воды.
- Монтаж рулевого механизма:
- Закрепите рулевой вал в корпусе с помощью пластиковых или латунных втулок для обеспечения свободного вращения без люфтов.
- Наденьте руль на загнутый конец вала и зафиксируйте клеем эпоксидным или мелкими винтами.
- Подсоедините другой конец вала к рычагу сервопривода, убедившись в жесткой фиксации для точной передачи усилия.
- Проверьте ход руля – он должен составлять не менее 30 градусов в каждую сторону без заеданий.
- Смонтируйте и закрепите сервопривод в отсеке управления с минимальным люфтом и с возможностью регулировки положения для балансировки рулевого управления.
Рекомендуется использовать влагозащищенные сервоприводы с моментом не менее 1.5 кг·см для точного управления лодкой. Проверяйте свободный ход и надежность фиксации всех элементов перед установкой крышки корпуса.
Сборка и подключение электроники и аккумуляторов

Для управления радиоуправляемой лодкой необходимы мотор, регулятор скорости (ESC), приёмник, аккумулятор и контроллер управления. Все компоненты должны быть совместимы по напряжению и току.
-
Выбор и подготовка аккумулятора:
- Используйте LiPo аккумулятор 7.4 В (2S) с емкостью от 2200 до 5000 мА·ч для оптимального баланса веса и времени работы.
- Обеспечьте балансирующую зарядку через специальное LiPo зарядное устройство с функцией контроля безопасности.
- Перед подключением проверьте напряжение каждой банки, оно должно быть не менее 3.7 В.
-
Подключение регулятора скорости (ESC):
- Подключите ESC к мотору, соблюдая полярность фазных проводов (цвета могут варьироваться, ориентируйтесь на документацию мотора).
- Сигнальный провод ESC подключается к приёмнику к каналу газа (обычно канал 2).
- Питание ESC от аккумулятора подключается через соответствующие разъемы XT60 или Deans, надежно зафиксируйте соединения.
-
Подключение приёмника и сервоприводов:
- Подайте питание на приёмник через ESC или отдельный BEC с напряжением 5 В.
- Сервопривод руля подключается к каналу руля (обычно канал 1) приёмника.
- Перед первым запуском выполните калибровку сервоприводов, установив руль в центральное положение.
-
Сборка и компоновка компонентов:
- Расположите аккумулятор максимально низко и по центру корпуса для стабильности лодки.
- Зафиксируйте все элементы монтажными лентами или клеем на горячем основе, избегая контакта с водой.
- Используйте влагозащитные корпуса для приёмника и регулятора, обеспечьте вентиляцию для предотвращения перегрева.
-
Проверка и тестирование:
- Проверьте полярность всех соединений перед подачей питания.
- Выполните проверку управления на суше, убедитесь в правильной реакции мотора и руля.
- Контролируйте температуру регулятора и мотора во время теста, избегайте перегрузок.
Герметизация корпуса и защита электроники от воды

Для герметизации корпуса используйте эпоксидную смолу или полиуретановый герметик с минимальной усадкой. Все стыки тщательно промажьте и дайте высохнуть не менее 24 часов при температуре от +20 °C. Особое внимание уделите местам прохождения проводов – применяйте силиконовые уплотнители и герметичные вводы кабеля.
Электронные компоненты размещайте в отдельном герметичном отсеке, выполненном из пластика ABS или алюминия с уплотнительными резиновыми прокладками на крышке. Для фиксации крышки используйте винты с резьбой и силиконовую смазку на прокладках, что предотвратит попадание влаги при вибрациях и ударных нагрузках.
Внутренние соединения проводки обрабатывайте термоусадочными трубками с клеевым слоем. Дополнительно можно использовать изоляционную ленту с влагозащитой или лак для печатных плат с защитным эффектом.
Перед окончательной сборкой протестируйте корпус в воде на глубине 30-50 см в течение 15 минут. При появлении капель внутри отсека повторите герметизацию проблемных зон. Обязательно обеспечьте вентиляционные отверстия с гидрофобными мембранами для предотвращения конденсата внутри корпуса.
Рекомендуется применять влагозащитные разъемы типа IP67 или выше для внешних подключений. Это значительно снижает риск коротких замыканий и выхода из строя электроники при эксплуатации на воде.
Тестирование и настройка ходовых характеристик лодки
Первый этап – проверка баланса корпуса. Лодка должна плавать ровно, без наклонов в стороны и нос или корму. Для этого поставьте её на воду в спокойном месте и оцените положение. Если лодка заваливается, измените расположение аккумулятора или компонентов, сместив вес в противоположную сторону.
Далее проверьте работу мотора на малой скорости. Запустите двигатель и убедитесь, что винт не пробуксовывает и не издаёт лишних вибраций. Если мотор перегревается или теряет мощность, проверьте состояние аккумулятора и контакты. При необходимости смените винт на меньший диаметр для снижения нагрузки.
При выходе на полный газ обратите внимание на устойчивость курса. Лодка не должна сильно отклоняться в сторону или поворачивать без управления. Для корректировки направления подстройте руль, изменяя угол наклона до тех пор, пока лодка не пойдёт строго прямо.
Оптимальная скорость для данной модели обычно достигается при частоте вращения винта в диапазоне 2500–3500 оборотов в минуту. Измерить это можно тахометром или по ощущениям: лодка должна быстро набирать ход, но без вибраций и раскачиваний.
Если лодка склонна к раскачиванию на волнах, добавьте небольшой груз в центр корпуса для увеличения инерции. В случаях чрезмерного погружения кормы или носа отрегулируйте положение элементов внутри корпуса, чтобы обеспечить более равномерное распределение веса.
После каждой корректировки обязательно повторяйте тест на воде. Изменения должны фиксироваться постепенно, чтобы определить влияние каждой настройки. Время теста не должно быть меньше 10 минут, чтобы выявить стабильность и избежать перегрева мотора.
Для окончательной проверки используйте разные режимы управления: плавный ход, резкие повороты и остановки. Лодка должна реагировать на команды точно и без задержек, при этом не теряя скорости и не теряя курса.
Обслуживание и ремонт радиоуправляемой лодки после эксплуатации
После каждого запуска тщательно промойте корпус пресной водой, особенно если лодка эксплуатировалась в соленой или загрязненной воде. Солевые и минеральные отложения ускоряют коррозию металлических деталей и ухудшают работу электрики.
Осмотрите винт на наличие повреждений и загрязнений. Срезанные или деформированные лопасти снижают маневренность и повышают нагрузку на мотор. При необходимости аккуратно исправьте форму или замените винт.
Проверьте соединения электропроводки, контакты и разъемы на коррозию и потерю плотности. При обнаружении следов окисления протрите контакты спиртом и обработайте специальным защитным средством, например, контактной смазкой.
Аккумуляторные батареи следует зарядить согласно инструкции и хранить при температуре от +5 до +20 °C. Разряженные батареи не оставляйте в лодке, чтобы избежать глубокого разряда и снижения емкости.
Корпус лодки осмотрите на наличие трещин, сколов и царапин. Мелкие повреждения герметизируйте эпоксидной смолой или силиконовым герметиком. Если вода проникает внутрь, высушите корпус и проверьте внутренние отсеки на признаки коррозии и повреждений электроники.
Проверяйте работу рулевого механизма, подтягивайте ослабленные крепления и смазывайте подвижные части силиконовой смазкой или легким машинным маслом. Жесткий или заедающий руль снижает управляемость и может привести к поломке сервопривода.
Регулярно обновляйте прошивку управляющего контроллера, если это предусмотрено производителем. Новые версии могут улучшить стабильность и функциональность системы управления.
При обнаружении неисправностей в моторе или электронике проведите диагностику мультиметром и осмотрите все элементы на предмет коротких замыканий или обрывов. Замените неисправные компоненты новыми с аналогичными параметрами.
Храните лодку в сухом, проветриваемом помещении, защищенном от прямого солнечного света и пыли. Избегайте контакта корпуса с острыми предметами и химикатами.
Вопрос-ответ:
Какие основные компоненты нужны для сборки радиоуправляемой лодки своими руками?
Для сборки радиоуправляемой лодки понадобятся корпус (лучше из легких материалов, например, пластика или фанеры), электродвигатель с редуктором, аккумулятор, радиоуправляющая система (пульт и приёмник), сервоприводы для управления рулём и, возможно, винт или гребной механизм. Кроме того, потребуется проводка, выключатели и элементы крепления. Все эти компоненты должны подходить по размерам и техническим характеристикам, чтобы лодка была устойчивой и работала без сбоев.
Как правильно выбрать аккумулятор для радиоуправляемой лодки?
Аккумулятор следует выбирать исходя из предполагаемой нагрузки на двигатель и времени работы. Обычно используют литий-полимерные (LiPo) аккумуляторы из-за их высокой энергоёмкости и небольшого веса. Важно подобрать батарею с достаточной ёмкостью (мАч) для желаемого времени работы и соответствующим напряжением, подходящим под двигатель и регулятор скорости. Также нужно учитывать габариты и вес аккумулятора, чтобы лодка сохраняла баланс и не была слишком тяжёлой.
Какие ошибки часто допускают при сборке радиоуправляемой лодки и как их избежать?
Чаще всего встречаются ошибки, связанные с неправильным подключением электродвигателя или радиоуправления, из-за чего лодка не реагирует на команды или двигается в обратную сторону. Также нередко корпус плохо герметизируют, и вода попадает внутрь, что приводит к поломке электроники. Чтобы избежать таких проблем, нужно внимательно проверять все соединения, использовать влагозащитные материалы и тестировать работу систем до запуска в воду. Важно также правильно сбалансировать лодку, чтобы она не кренилась и не тонувала.
Какой тип корпуса лучше использовать для самодельной радиоуправляемой лодки — пластиковый или деревянный?
Выбор корпуса зависит от личных предпочтений и опыта. Пластиковый корпус легче обработать и сделать водонепроницаемым, при этом он устойчив к воздействию воды и проще в уходе. Деревянный корпус требует больше времени на обработку и защиту от влаги (например, с помощью лака или эпоксидной смолы), зато он может быть более прочным и эстетичным при правильной сборке. В обоих случаях важно тщательно проверить герметичность и сбалансировать конструкцию.
Какие нюансы стоит учесть при настройке управления рулём и скоростью лодки?
При настройке управления важно проверить чувствительность сервоприводов и регулятора скорости, чтобы лодка точно реагировала на команды. Руль должен иметь достаточный угол поворота для манёвренности, но не слишком большой, чтобы избежать излишних колебаний. Регулятор скорости нужно подобрать с учётом мощности мотора и типа аккумулятора. Перед запуском стоит провести несколько пробных движений на суше или в мелкой воде, чтобы убедиться, что управление плавное и без задержек.
Какие материалы и компоненты потребуются для сборки радиоуправляемой лодки своими руками?
Для создания радиоуправляемой лодки понадобятся корпус, который можно сделать из пластика, дерева или легкого металла. Важно подобрать подходящий мотор — обычно используются бесколлекторные или коллекторные электродвигатели с подходящей мощностью. Также потребуется пульт управления с приемником, аккумуляторная батарея, регулятор скорости, серво-привод для рулевого управления, а также провода и крепежные элементы. Для корпуса полезно предусмотреть водонепроницаемый отсек для электроники. Кроме того, могут понадобиться инструменты для сборки и пайки, а также материалы для герметизации швов, чтобы предотвратить попадание воды внутрь.
Как правильно настроить систему управления лодкой, чтобы обеспечить стабильное и точное управление на воде?
Для корректной настройки управления сначала нужно установить и закрепить все элементы — мотор, серво-привод и приемник — в корпусе лодки. Затем следует подключить регулятор скорости к мотору и приемнику, убедившись в правильности полярности проводов. После этого пульт управления и приемник необходимо синхронизировать. На суше проверяется работа рулевого механизма и реакция мотора на команды с пульта. Очень важно добиться плавного хода руля и правильного направления движения мотора. Во время испытаний на воде стоит обратить внимание на баланс лодки — если она кренится или идет в сторону, возможно, потребуется отрегулировать положение аккумулятора или добавить груз. Правильная настройка поможет управлять лодкой уверенно, без резких рывков и с точным реагированием на команды.





