Изменение направления вращения шагового двигателя достигается путём перестановки фазных проводов. В случае с двухфазным двигателем типа bipolar reversal можно выполнить, поменяв местами одну из фаз – например, A+ и A-. Это приведёт к инверсии сигнала на обмотке и, как следствие, к обратному вращению ротора.
Для управления шаговым двигателем через драйвер, например A4988 или DRV8825, направление задаётся сигналом на пине DIR. Логический уровень HIGH вращает двигатель в одном направлении, LOW – в противоположном. Периодическая смена состояния DIR позволяет реализовать обратное движение без переподключения проводов.
Если используется микроконтроллер, программное изменение направления возможно через изменение логики сигнала на DIR. В Arduino, к примеру, используется команда digitalWrite(dirPin, HIGH) или LOW в зависимости от требуемого направления. Это особенно важно при автоматизации перемещений, например, в ЧПУ-системах или 3D-принтерах.
При работе с драйверами и микроконтроллерами важно учитывать схему подключения и соответствие нумерации пинов. Ошибки на этом этапе могут привести к неправильному вращению или полной остановке двигателя. Также рекомендуется проверять фактическое направление вращения после изменения сигнала DIR, особенно при использовании нестандартных библиотек или внешних контроллеров.
Как изменить направление вращения с помощью замены полярности обмоток
Для изменения направления вращения шагового двигателя достаточно поменять полярность одной из обмоток. Это применимо как к биполярным, так и к униполярным шаговым двигателям, однако в случае с униполярными моделями предпочтительнее использовать соответствующий драйвер, поддерживающий смену направления сигналом.
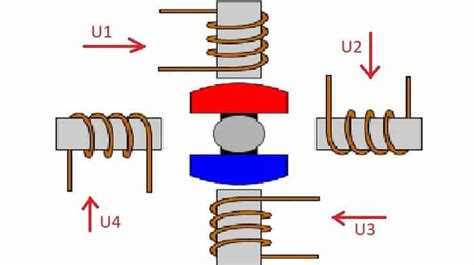
В биполярных двигателях имеется две обмотки. Обозначим их как A-A’ и B-B’. При прямом подключении, если двигатель вращается по часовой стрелке, то инвертирование подключения одной обмотки (например, поменять местами A и A’) приведёт к вращению против часовой стрелки. Аналогично, замена местами B и B’ также изменит направление.
Пример подключения биполярного шагового двигателя:
| A | OUT1 | OUT2 |
| A’ | OUT2 | OUT1 |
| B | OUT3 | OUT4 |
| B’ | OUT4 | OUT3 |
Если двигатель подключён через микроконтроллер, смена направления возможна программно через изменение уровня сигнала DIR. Это предпочтительный метод, поскольку исключает механическое вмешательство и риск ошибки в подключении.
Перед изменением подключения убедитесь в отключении питания. Подключение или переподключение обмоток при включённом питании может привести к выходу драйвера из строя.
Настройка направления вращения через параметры драйвера
Изменение направления вращения шагового двигателя обычно выполняется через изменение логического уровня сигнала на входе DIR (Direction) драйвера. У большинства драйверов, таких как A4988, DRV8825 или TMC2209, этот вход принимает два состояния: низкий уровень (0 В) для одного направления и высокий уровень (обычно 3.3 В или 5 В) для противоположного.
На драйверах типа TMC2209 при использовании UART можно изменить направление через программные регистры. Параметр ‘shaft’ в регистре GCONF отвечает за направление вращения: значение 0 – по умолчанию, 1 – инвертированное направление. Изменение этого бита моментально влияет на вращение без необходимости переподключения проводов.
Перед внесением изменений убедитесь, что питание двигателя отключено. При использовании микроконтроллера стоит предусмотреть задержку после подачи питания, прежде чем устанавливать уровень DIR, чтобы избежать случайного рывка при запуске.
Избегайте частого переключения DIR во время движения. Смена направления должна происходить только при полной остановке вала, иначе возможны пропуски шагов и перегрев.
Программное управление направлением вращения на Arduino
Для управления направлением вращения шагового двигателя через Arduino применяется изменение логического уровня на одном из управляющих пинов. Наиболее распространённый драйвер – A4988. Он требует подключения минимум трёх пинов: STEP, DIR и GND.
Пин DIR определяет направление вращения. Логический 0 соответствует одному направлению, логическая 1 – противоположному. Переключение уровня на DIR до подачи импульса STEP изменяет направление шага.
Пример подключения: DIR – к пину 2 Arduino, STEP – к пину 3. Перед изменением направления необходимо завершить текущую серию шагов, иначе мотор может пропустить шаг или дёрнуться. Использование функции `digitalWrite()` позволяет программно изменять направление:
const int dirPin = 2;
const int stepPin = 3;
void setup() {
pinMode(dirPin, OUTPUT);
pinMode(stepPin, OUTPUT);
}
void loop() {
digitalWrite(dirPin, HIGH);
for (int i = 0; i < 200; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepPin, LOW);
delayMicroseconds(800);
}
delay(1000);
digitalWrite(dirPin, LOW);
for (int i = 0; i < 200; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepPin, LOW);
delayMicroseconds(800);
}
delay(1000);
}
При необходимости изменить направление на лету стоит учитывать инерцию ротора. Желательно вставлять паузу между сменой направления и началом нового движения, например `delay(50)`.
Если используется драйвер типа DRV8825, логика управления идентична. При работе с библиотеками (AccelStepper, Stepper и т.д.) направление задаётся через методы `setSpeed()` или `moveTo()`, где положительное значение определяет одно направление, отрицательное – другое.
Использование микроконтроллера STM32 для реверса шагового двигателя
Микроконтроллеры STM32 позволяют точно управлять направлением вращения шагового двигателя за счёт гибкой настройки таймеров и GPIO. Для реализации реверса требуется изменить порядок активации обмоток двигателя через драйвер, подключённый к выходам контроллера.
- Используется таймер общего назначения (например, TIM2) для генерации импульсов STEP.
- Изменение логического уровня на DIR меняет направление вращения. Логика: 0 – по часовой, 1 – против часовой стрелки (или наоборот, зависит от подключения).
Пример настройки на STM32CubeMX:
- DIR назначить на отдельный GPIO, также как выход.
- Создать функцию, которая меняет уровень на DIR в зависимости от выбранного направления:
void SetDirection(uint8_t dir) {
if (dir) {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); // Против часовой
} else {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET); // По часовой
}
}Перед началом генерации импульсов необходимо задать нужное направление. Временная задержка (около 10–20 мкс) между сменой DIR и началом подачи STEP-пульсов снижает риск ошибок переключения на драйвере.
Для точного позиционирования используется счёт количества импульсов STEP. При реверсе важно пересчитывать шаги относительно текущего положения, если требуется возврат в исходную точку.
При использовании библиотеки HAL минимизировать задержки можно через прямую работу с регистрами (LL-библиотека или CMSIS). Это особенно важно при высокочастотной работе (свыше 10 кГц).
Рекомендуется тестировать реверс на низких частотах, постепенно увеличивая скорость, контролируя стабильность работы двигателя и нагрев драйвера.
Как изменить направление вращения в GRBL-конфигурации
$3 – это побитовая маска инверсии направления. Каждый бит отвечает за конкретную ось: бит 0 – X, бит 1 – Y, бит 2 – Z. Если бит установлен в 1, направление сигнала инвертируется.
Примеры значений:
$3=0 – все оси по умолчанию (без инверсии)
$3=1 – инверсия направления X
$3=2 – инверсия направления Y
$3=4 – инверсия направления Z
$3=3 – инверсия X и Y
Для изменения параметра подключитесь к контроллеру через терминал (например, через Universal G-code Sender), введите нужное значение, например:
$3=1
После ввода параметр сохранится во внутренней памяти. Перезагрузка устройства не требуется.
Если направление вращения изменилось неправильно, проверьте распиновку драйверов и соответствие фаз мотора. При неправильном подключении возможна нештатная работа двигателя.
Проверка направления вращения с помощью осциллографа и логического анализатора

Для точной проверки направления вращения шагового двигателя необходимо зафиксировать чередование управляющих импульсов на обмотках. Осциллограф и логический анализатор позволяют отслеживать последовательность сигналов от драйвера или контроллера и определить, соответствует ли она заданному направлению.
- Подключите щупы осциллографа к выходам драйвера, управляющим фазами A и B. Если используется логический анализатор, назначьте соответствующие каналы для каждого сигнала.
- Установите скорость развертки осциллографа около 1 мс/дел, если частота шагов находится в пределах 100–1000 Гц.
- Включите генерацию шагов с постоянным направлением и фиксированной частотой. Для контроллера Arduino используйте простой цикл с digitalWrite и delayMicroseconds.
На экране осциллографа должно быть видно, как импульсы на фазах A и B смещаются друг относительно друга. Если последовательность сигнала A опережает сигнал B, направление вращения одно. При изменении направления сигналы меняются местами: теперь сигнал B опережает A.
Для логического анализатора:
- Запустите захват при включении шагов. Ориентируйтесь по фронтам – анализатор должен отобразить временные метки импульсов.
- Проверьте порядок смены уровней на каналах. Например, если шаги передаются в последовательности A → B → A̅ → B̅ – направление по часовой стрелке. При смене направления – порядок инверсируется.
Если двигатель вращается неправильно, а последовательность на осциллограмме подтверждает ошибочный порядок, нужно поменять местами сигнальные провода фаз либо изменить направление через управляющий сигнал DIR в контроллере.
Ошибки при смене направления и способы их устранения
Наиболее частая ошибка – перепутанные сигналы STEP и DIR. При инверсии направления необходимо изменить уровень сигнала на входе DIR, но не трогать STEP. Если поменять оба, двигатель не изменит направление, а может остановиться или дёргаться.
Вторая ошибка – отсутствие задержки между сменой направления и подачей следующего импульса. Некоторые драйверы требуют паузы в 5–20 мкс после изменения DIR перед следующим STEP. Без неё возможны пропуски шагов или движение в неверную сторону.
Неверная настройка микрошагов – ещё один источник проблем. При смене направления драйвер должен оставаться в том же режиме деления шага. При несоответствии микроконтроллер может подавать команды, не согласованные с реальной механикой движения.
Ошибки в прошивке: неправильная логика смены направления, особенно в случае программного формирования сигналов. Если DIR изменяется во время активного STEP, может произойти срыв синхронизации.
Контактные проблемы в линии DIR приводят к случайным сменам направления. При длинных проводах требуется экранирование и подтягивающие резисторы, чтобы исключить ложные импульсы.
Неправильная инициализация при старте. Если DIR устанавливается после подачи питания, но до завершения инициализации драйвера, возможен произвольный начальный вектор вращения.
Для устранения этих ошибок: проверять порядок сигналов логическим анализатором; добавлять задержку после смены DIR; использовать экранированные кабели; программно исключать изменения направления во время активных импульсов; проверять конфигурацию микрошагов при каждом запуске.
Вопрос-ответ:
Можно ли изменить направление вращения шагового двигателя, не меняя программный код?
Да, это возможно. Один из способов — перестановка проводов обмоток на драйвере. Если поменять местами провода одной из фаз, двигатель начнёт вращаться в противоположную сторону. Однако такой способ не подойдёт, если доступ к проводам ограничен или используется корпус с запаянными соединениями. В таком случае проще внести изменения в код управляющего контроллера.
Как изменить направление вращения шагового двигателя через Arduino?
На Arduino направление задаётся состоянием пина, подключённого к входу DIR драйвера. Если подать на него высокий уровень (HIGH), двигатель будет вращаться в одну сторону, если низкий (LOW) — в другую. Чтобы изменить направление, достаточно изменить значение логического сигнала в программе. Например, `digitalWrite(dirPin, HIGH);` можно заменить на `digitalWrite(dirPin, LOW);`.
Имеет ли значение порядок подключения фаз при использовании драйвера типа A4988?
Да, порядок подключения фаз имеет значение. Двигатель не будет работать корректно, если фазы подключены неправильно. В лучшем случае он будет вибрировать, но не вращаться, в худшем — может перегреться или повредиться. Чтобы изменить направление вращения, достаточно поменять местами одну пару проводов, относящихся к одной фазе. Это не влияет на работу драйвера, но меняет направление вращения двигателя.
Можно ли менять направление вращения во время работы двигателя?
Да, шаговые двигатели допускают изменение направления на ходу. Это часто используется в 3D-принтерах, ЧПУ-станках и других устройствах. Главное условие — корректная реализация в прошивке. Контроллер должен давать сигнал смены направления с учётом того, что двигатель может находиться в движении. При резком переключении без паузы возможны пропуски шагов или кратковременные сбои.
Как понять, что двигатель вращается в неправильную сторону?
Это становится очевидным при работе механизма, в котором двигатель установлен. Например, в 3D-принтере платформа будет двигаться в сторону, противоположную ожидаемой, или печатающая головка будет выходить за пределы рабочей зоны. В станке ЧПУ резец может пойти «на себя», а не «от себя». Такие признаки указывают на необходимость изменить направление вращения. Это можно сделать либо в прошивке, либо изменением подключения фаз.