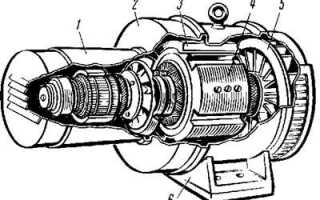
Синхронные машины представляют собой электрические машины переменного тока, ротор которых вращается с частотой, строго совпадающей с частотой вращающегося магнитного поля статора. Основной признак – жесткая синхронная связь между скоростью ротора и частотой питающего напряжения. Это отличает их от асинхронных аналогов, в которых наблюдается скольжение.
Ключевая характеристика – наличие возбуждения, чаще всего реализуемого с помощью обмотки возбуждения на роторе, питаемой постоянным током. В некоторых конструкциях используется постоянный магнит, обеспечивающий постоянное магнитное поле. Это позволяет формировать устойчивый вращающийся момент при любом значении нагрузки, при условии сохранения синхронизма.
Еще один признак – возможность регулирования коэффициента мощности за счет изменения тока возбуждения. При недо- или пере возбуждении машина может работать с реактивной нагрузкой индуктивного или емкостного характера, что позволяет использовать её в качестве компенсатора реактивной мощности в сети.
Синхронные машины чувствительны к изменениям нагрузки: при её резком увеличении возможен срыв синхронизма, так как ротор не успевает сохранить фазовое совпадение с полем статора. Это требует точного расчёта пусковых и рабочих режимов, а также наличия систем автоматического регулирования возбуждения.
Конструктивные особенности – наличие демпферной обмотки, способствующей гашению колебаний при переходных процессах, и более массивный ротор, по сравнению с асинхронными машинами. Эти элементы обеспечивают стабильную работу в синхронном режиме даже при нестабильной нагрузке.
Отличие синхронной машины от асинхронной по принципу вращения ротора
Синхронная машина работает при постоянной скорости вращения ротора, равной частоте вращающегося магнитного поля статора. Это достигается за счёт наличия возбуждения на роторе – постоянного тока, подаваемого через контактные кольца или бесконтактную систему возбуждения. Ротор втягивается в магнитное поле и вращается строго синхронно с ним без скольжения.
В асинхронной машине ротор вращается с отставанием от магнитного поля статора. Это отставание – скольжение – необходимо для генерации ЭДС в обмотках ротора и, как следствие, возникновения вращающего момента. При нулевом скольжении асинхронная машина перестаёт развивать крутящий момент. Скольжение изменяется от 5 до 10% в зависимости от нагрузки и конструкции.
Синхронный двигатель не способен самостоятельно разогнаться до рабочей скорости – требуется внешнее устройство запуска или предварительный разгон. Асинхронный двигатель запускается напрямую от сети благодаря возникающему индукционному току в роторе. Это делает асинхронные машины предпочтительными для приложений, где требуется простота запуска и надёжность при переменной нагрузке.
Синхронная машина обеспечивает стабильную скорость при любых изменениях нагрузки, что критически важно в системах с жёсткими требованиями к частоте вращения – например, в генераторах и приводах точных станков. Асинхронная машина чувствительна к изменению нагрузки, что проявляется в изменении оборотов и крутящего момента.
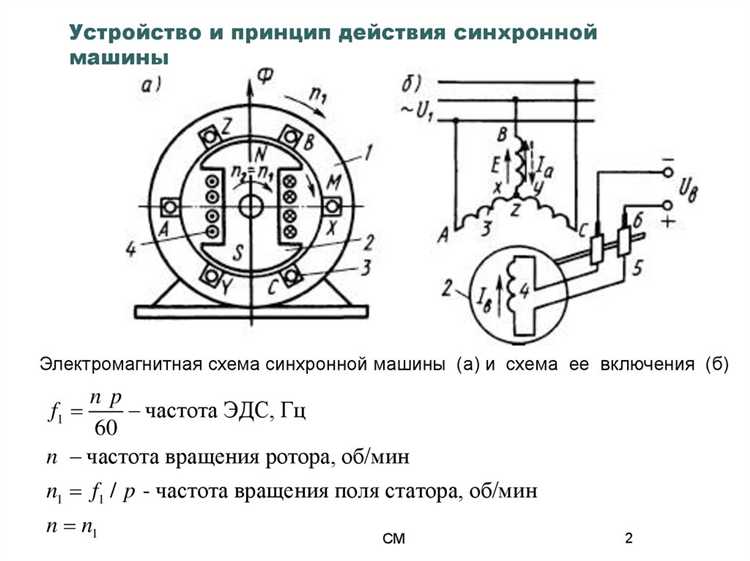
Зависимость частоты вращения от частоты питающей сети
Частота вращения ротора синхронной машины определяется частотой переменного тока в питающей сети и числом пар полюсов. Связь выражается формулой:
n = 60 × f / p, где:
- n – синхронная частота вращения ротора (об/мин);
- f – частота сети (Гц);
- p – число пар полюсов.
При стандартной частоте сети 50 Гц и двух парах полюсов ротор вращается со скоростью 1500 об/мин. Увеличение числа пар полюсов снижает частоту вращения: при 4 парах – 750 об/мин, при 6 – 500 об/мин. Это свойство критично при проектировании приводов, где необходимо обеспечить определённые обороты без применения редукторов.
При использовании синхронных машин в сетях с иной частотой (например, 60 Гц в США) необходимо пересчитывать частоту вращения. Несоблюдение соответствия может привести к механическим перегрузкам и снижению КПД.
Рекомендации:
- Перед выбором машины определить требуемую скорость и доступную частоту питания.
- Подбирать количество пар полюсов с учётом частоты сети, избегая несоответствия между требуемыми и расчетными оборотами.
- Для переменной скорости использовать преобразователи частоты, сохраняя синхронный режим работы.
Игнорирование зависимости приводит к неправильному выбору оборудования и снижению его ресурса. При необходимости работы в нестандартных частотных условиях предпочтительны синхронные машины с регулируемым возбуждением и управляемыми приводами.
Наличие возбуждающего устройства и его роль
Современные системы возбуждения делятся на контактные (щеточно-коллекторные) и бесконтактные (включая бесщеточные и статические схемы). Бесщеточные возбуждающие устройства, построенные на основе вспомогательного генератора с вращающимся выпрямителем, исключают необходимость в обслуживании скользящих контактов, повышая надежность и срок службы машины в условиях длительной работы.
Реализация автоматического регулирования возбуждения (АРВ) позволяет поддерживать напряжение на клеммах генератора в пределах отклонений не более ±1%. В системах с повышенными требованиями к устойчивости, например, на электростанциях, применяются тиристорные статические возбуждающие устройства, обеспечивающие отклик менее 20 мс и возможность быстрого форсирования тока возбуждения в аварийных режимах.
Для синхронных компенсаторов актуально наличие возбуждающего устройства с возможностью плавного регулирования коэффициента реактивной мощности. Это позволяет динамически компенсировать колебания реактивной нагрузки в сети, стабилизируя напряжение и снижая потери энергии.
Выбор типа возбуждающего устройства должен основываться на эксплуатационных условиях, требуемом быстродействии, характеристиках сети и доступности технического обслуживания. Отказ от АРВ в условиях нестабильной сети может привести к срыву синхронизма, перегреву и преждевременному выходу машины из строя.
Признаки устойчивой синхронизации под нагрузкой
Постоянство угла нагрузки – ключевой индикатор устойчивой синхронизации. При неизменной активной и реактивной нагрузке угол между напряжением ротора и результирующим напряжением на зажимах машины сохраняется в допустимых пределах, не превышая 30–40 электрических градусов для большинства промышленных установок.
Отсутствие колебаний частоты вращения свидетельствует о прочной связи с синхронной сетью. Незначительные отклонения в пределах ±0,1% допустимы только в переходных режимах. При длительной работе с заметными флуктуациями возможен срыв синхронизма.
Стабильность тока возбуждения при переменной нагрузке указывает на корректную работу системы автоматического регулирования возбуждения. При устойчивом синхронизме корректировка тока возбуждения происходит плавно, без скачков и перерегулирования.
Плавное распределение реактивной мощности между синхронной машиной и сетью – еще один признак. При устойчивом режиме синхронный генератор либо потребляет, либо отдает реактивную мощность в зависимости от угла опережения или отставания, но делает это без резких изменений при колебаниях нагрузки.
Сохранение формы кривой тока и напряжения – важный критерий. При устойчивом режиме не наблюдается резких искажений синусоиды. Появление гармоник или провалов указывает на нарушение синхронизации или перегрузку.
Низкий уровень вибраций и отсутствие дополнительных шумов при нагрузке подтверждают стабильность электромеханического взаимодействия ротора с вращающимся магнитным полем.
Регулярный мониторинг указанных параметров позволяет своевременно обнаруживать отклонения и предотвращать потерю синхронного режима.
Поведение синхронной машины при изменении тока возбуждения
Изменение тока возбуждения напрямую влияет на величину ЭДС, генерируемой в обмотке якоря синхронной машины, а также на угол нагрузки и режим работы генератора или двигателя. Эти изменения отражаются на рабочих параметрах и устойчивости системы.
- При увеличении тока возбуждения растёт ЭДС, что приводит к увеличению напряжения на зажимах генератора при постоянной нагрузке. Это сопровождается снижением угла между током и напряжением, повышая коэффициент мощности.
- При чрезмерном возбуждении машина переходит в режим перегрузки по напряжению, что может привести к перенапряжению в сети, особенно при работе в изолированной системе. Увеличивается реактивная мощность, отдаваемая в сеть, возрастает нагрузка на изоляцию.
- При снижении тока возбуждения падает ЭДС и, соответственно, напряжение на зажимах. Генератор начинает забирать реактивную мощность из сети, что снижает коэффициент мощности и может вызвать снижение напряжения в точке подключения.
- Критическое снижение возбуждения приводит к потере синхронизма. Возникают колебания ротора, возрастает ток якоря, наблюдаются гармонические искажения. Защитные устройства фиксируют аварийное состояние.
- В режиме двигателя изменение тока возбуждения позволяет регулировать потребление или отдачу реактивной мощности в сеть. Повышение возбуждения – к отдаче (компенсация), снижение – к потреблению (реактивная нагрузка).
- Для генераторов в параллельной работе необходимо координировать токи возбуждения, чтобы обеспечить равномерное распределение реактивной мощности между агрегатами.
- Автоматические регуляторы возбуждения обязаны стабилизировать напряжение и предотвращать критические режимы, особенно при переменных нагрузках.
- При эксплуатации важно избегать длительной работы в недовозбуждённом состоянии из-за риска устойчивой размагниченности ротора и перегрева обмоток.
Контроль и регулировка тока возбуждения – ключевой инструмент обеспечения стабильной, экономичной и безопасной работы синхронной машины в энергосистеме.
Характерные особенности пускового режима
Синхронные машины при пуске требуют внешнего источника частоты или дополнительного оборудования, так как самостоятельно не способны развивать вращающий момент на нулевой частоте. В начальной фазе пуска ротор машины не синхронизирован с вращающимся магнитным полем статора, что приводит к работе в режиме асинхронного двигателя с низким коэффициентом мощности и значительными токами.
Пусковой ток в синхронных машинах достигает 4–6 номинальных значений, что обусловлено отсутствием активного сопротивления ротора и большим индуктивным сопротивлением обмоток. Для ограничения этих токов применяют реакторы, пусковые реостаты или плавные пускатели с управлением напряжением. Отсутствие контроля пусковых токов вызывает перегрузки по обмоткам и снижает ресурс изоляции.
Переход из асинхронного режима в синхронный возможен только при совпадении частоты и положения ротора с магнитным полем статора. Для обеспечения этого используется вспомогательное возбуждение ротора через постоянные магниты или дополнительные обмотки возбуждения. При отсутствии синхронизации машина может «зависнуть» в режиме качания, вызывая механические нагрузки и электрические колебания.
Рекомендуется применять схемы плавного пуска с регулированием частоты и напряжения, например, с помощью частотных преобразователей. Это снижает пусковой ток до 1,5–2 номинальных значений и обеспечивает плавное наращивание крутящего момента, предотвращая рывки и колебания.
Особое внимание уделяется контролю возбуждения ротора на этапе пуска. Недостаточная токовая стабилизация возбуждения приводит к переходным процессам с высокими гармониками, что повышает потери и вибрации. Использование автоматических регуляторов возбуждения с ограничением по току и напряжению обеспечивает стабильность пуска и минимизирует динамические нагрузки.
Признаки работы в генераторном и моторном режимах
В синхронных машинах различие между генераторным и моторным режимами определяется направлением потока активной мощности и фазовым сдвигом между напряжением на обмотках статора и током.
При генераторном режиме активная мощность передается от ротора к сети: ток статора отстает по фазе от напряжения, угол нагрузки (δ) положительный и обычно составляет от 0° до +90°. Возникает избыточное электромагнитное вращающее усилие, преобразующее механическую энергию в электрическую.
В моторном режиме ток статора опережает напряжение, угол δ отрицательный, активная мощность направлена от сети к ротору. Машина потребляет механическую энергию, создавая крутящий момент, при этом δ лежит в диапазоне от 0° до -90°.
Для точного определения режима рекомендуется анализ векторной диаграммы: при генераторе вектор тока смещен назад относительно напряжения, при моторе – вперед. Измерение cosφ также отражает режим: коэффициент мощности при генераторе обычно отставлен (индуктивная нагрузка), при моторе – опережает (емкостная нагрузка).
Важный признак – направление вращения ротора и нагрузка по активной мощности, которые сопоставляются с фазовым сдвигом ток-напряжение. Нарушение соответствия приводит к переходу в нестабильный режим, что требует контроля параметров возбуждения и нагрузки.
Вопрос-ответ:
Какие основные признаки отличают синхронные машины от других электродвигателей?
Синхронные машины характеризуются тем, что их ротор вращается с частотой, точно совпадающей с частотой вращающегося магнитного поля статора. Это обеспечивает постоянную скорость вращения под нагрузкой. Также для синхронных машин характерна возможность работы с возбуждением постоянного тока для создания постоянного магнитного поля на роторе, что отличает их от асинхронных двигателей, где ротор не имеет постоянного магнитного поля и вращается с небольшой частотой скольжения.
Почему синхронные машины применяют для поддержания стабильной частоты в электросетях?
Синхронные машины способны поддерживать постоянную скорость вращения, совпадающую с частотой сети, благодаря чему они помогают стабилизировать частоту тока. При изменении нагрузки на сеть синхронный генератор автоматически корректирует угол между напряжением и током, удерживая частоту в заданных пределах. Это делает такие машины незаменимыми в энергосистемах для выработки электроэнергии с нужными параметрами.
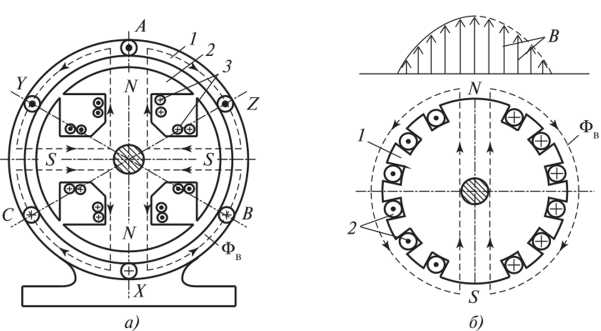
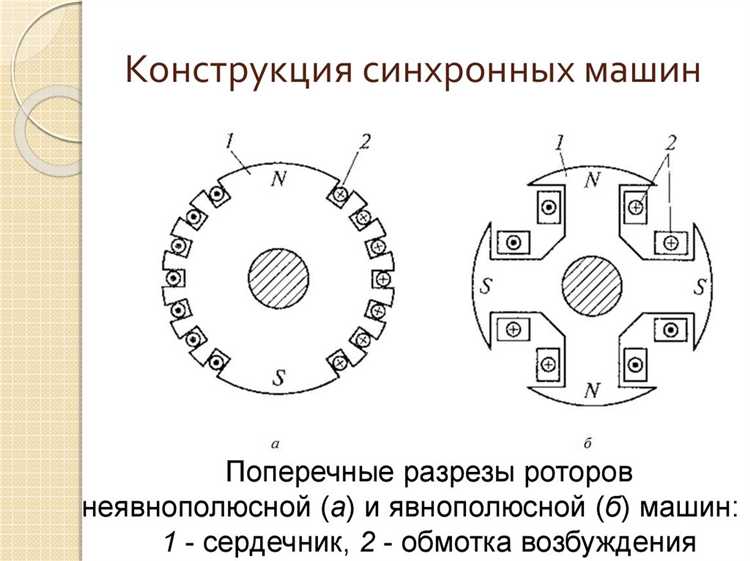
Как влияет конструкция ротора на работу синхронной машины?
Ротор синхронной машины может быть выполнен в виде явнополюсного или гладкополюсного типа. В первом случае на роторе располагаются выступающие полюса с обмотками возбуждения, что обеспечивает выраженное магнитное поле и характерно для машин низких скоростей. Гладкополюсный ротор имеет равномерную поверхность и используется в машинах высоких скоростей. Конструкция ротора влияет на распределение магнитного поля, пусковые характеристики и устойчивость работы машины.
Какие особенности синхронных машин необходимо учитывать при их эксплуатации?
При эксплуатации синхронных машин важно контролировать состояние обмоток возбуждения и системы охлаждения, так как перегрев может привести к снижению надежности. Также необходимо следить за углом нагрузки, чтобы избежать перехода машины в режим нестабильной работы. Правильная регулировка возбуждения влияет на коэффициент мощности и эффективность работы, что важно для оптимального использования машины в энергосистеме или приводных установках.