

Разработка пульта управления для радиоуправляемой машинки требует точного подбора компонентов и понимания принципов радиосвязи. В основе конструкции лежит микроконтроллер, работающий с радиомодулем на частоте 2.4 ГГц, обеспечивающим надежную связь на расстоянии до 50 метров без помех. Для питания устройства оптимально использовать аккумуляторы Li-Po емкостью от 500 мА·ч, что обеспечивает несколько часов автономной работы.
Проект предусматривает использование двух джойстиков для управления движением вперед/назад и поворотами, с программируемой чувствительностью. Для передачи данных применяется протокол SPI, обеспечивающий быструю и устойчивую передачу команд. Важным этапом является настройка частотного канала и калибровка сенсоров, что исключает задержки и «зависания» в управлении.
Плата пульта собирается на печатной плате с компактным размещением элементов для удобства использования. Для сборки рекомендуется применять SMD-компоненты и разъемы JST для удобной замены аккумуляторов. В итоге устройство получается легким, эргономичным и адаптируемым под разные модели радиомашинок, обеспечивая точное и отзывчивое управление.
Выбор компонентов для радиоуправления: радиомодуль и микроконтроллер
Альтернативой может служить радиомодуль HC-12 с частотой 433 МГц, который обеспечивает дальность до 1 км при меньшем потреблении энергии, но требует более сложной настройки и может быть менее устойчив к помехам в городской среде.
При выборе микроконтроллера следует обратить внимание на наличие аппаратных прерываний и таймеров для реализации плавного управления двигателями и обработки сигналов от пульта без задержек. Важна также поддержка библиотек для выбранного радиомодуля, что ускорит разработку и упростит отладку.
Для питания системы рекомендуется использовать стабилизаторы напряжения с низким уровнем шумов (например, AMS1117-3.3 для nRF24L01+), поскольку радиомодули чувствительны к нестабильному питанию и могут давать сбои при падениях напряжения.
Итог: сочетание nRF24L01+ с микроконтроллером STM32 или Arduino Nano – оптимальное решение для создания компактного и функционального пульта управления радиомашинкой с дальностью и надежностью связи, достаточной для большинства задач.
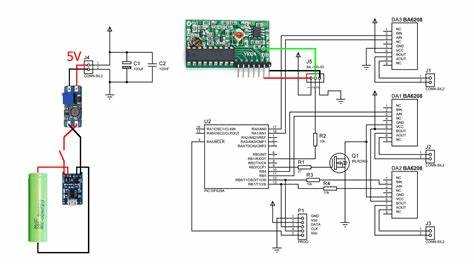
Схема подключения элементов пульта и приемника радиомашинки

Для надежного управления радиомашинкой важно правильно соединить все компоненты пульта и приемника, учитывая особенности питания и сигнальных линий.
- Питание:
- Пульт питается от батарей 4.5 В (3 элемента AA) с параллельным подключением стабилизатора напряжения на 3.3 В для микроконтроллера и радиомодуля.
- Приемник получает питание 5 В от отдельного источника или аккумулятора, стабилизированного до 5 В для работы сервоприводов и радиомодуля.
- Радиомодуль (например, NRF24L01):
- SPI интерфейс соединить с микроконтроллером: MOSI, MISO, SCK и CSN.
- Управляющие элементы пульта:
- Джойстик или потенциометры подключить к аналоговым входам микроконтроллера.
- Кнопки управления – к цифровым входам с подтягивающими резисторами (10 кОм к питанию или земле).
- Приемник радиомашинки:
- Микроконтроллер принимает данные с радиомодуля через SPI, обрабатывает сигналы и формирует управляющие сигналы для сервоприводов и моторов.
- Сервоприводы подключаются к PWM-выходам микроконтроллера через сигнальные провода, питание берется отдельно (4.8–6 В), чтобы избежать помех.
- Двигатели подключаются через драйвер моторов (например, L298N), который получает управляющие сигналы с микроконтроллера и питается от отдельного источника 7.4 В (Li-Po аккумулятор).
- Общие рекомендации:
- Все «земли» (GND) соединять в одной точке для минимизации шумов.
- Использовать экранированные провода для сигнальных линий радиомодуля и джойстика, чтобы уменьшить помехи.
- Добавить фильтрующие конденсаторы 0.1 мкФ возле питания радиомодуля и микроконтроллера.
Программирование микроконтроллера для передачи управляющих сигналов

Выбор микроконтроллера зависит от требований к частоте передачи и количеству управляющих каналов. Наиболее распространённые варианты – семейства STM32, ATmega и PIC с тактовой частотой от 8 до 72 МГц. Для радиоуправления критично обеспечить стабильный тайминг формирования сигналов и минимальную задержку отклика.
Для передачи сигналов часто используется протокол ШИМ (широтно-импульсная модуляция), позволяющий управлять скоростью и направлением движения моторов. Оптимальный период ШИМ – от 10 до 20 мс, с шириной импульса в диапазоне 1–2 мс. Таймеры микроконтроллера настраиваются в режиме захвата и сравнения для генерации точных временных интервалов.
Передача данных по радиоканалу реализуется через UART, SPI или специализированные радиомодули (NRF24L01, HC-12). Важно настроить скорость передачи данных с учётом пропускной способности и задержек, например, UART на 9600–115200 бод для низкоскоростных сигналов. Для минимизации ошибок рекомендуется использовать контроль четности и CRC.
Программная архитектура должна включать обработчик прерываний для мгновенного реагирования на входные команды и таймеры, генерирующие управляющие импульсы без блокировки основного цикла. Использование аппаратных прерываний и DMA позволяет разгрузить процессор и повысить стабильность работы.
Отладка начинается с тестирования формирования одиночного импульса на выходе с помощью осциллографа. После проверки стабильности переходят к циклической генерации и передаче пакетов команд на приёмник. Рекомендуется реализовать базовый протокол подтверждения приёма, чтобы исключить потерю управляющих сигналов.
Сборка и монтаж корпуса пульта с учетом эргономики

Для корпуса пульта управления радиомашинкой оптимально использовать ABS-пластик толщиной 2–3 мм, обеспечивающий достаточную прочность при малом весе. Размеры корпуса должны соответствовать ладони пользователя: длина – 130–150 мм, ширина – 60–70 мм, высота – 30–40 мм. При проектировании учитывайте расположение органов управления так, чтобы основные кнопки и джойстики располагались в зоне досягаемости большого и указательного пальцев без перенапряжения.
Расположение элементов управления следует планировать симметрично для удобства работы обеими руками. Минимальное расстояние между кнопками – 12 мм, чтобы избежать случайных нажатий. Джойстик рекомендуется устанавливать с наклоном 10–15° вперед для естественного положения запястья. Для предотвращения скольжения корпус оснащается резиновыми вставками на боковых гранях, толщиной 1,5 мм.
Сборка корпуса осуществляется с использованием мелких саморезов М2, которые позволяют легко разобрать пульт для обслуживания. Для крепления платы применяются пластиковые стойки высотой 10 мм, расположенные согласно монтажным отверстиям, что гарантирует надежную фиксацию без деформации элементов. Внутренние полости корпуса проектируются с запасом не менее 3 мм вокруг электронных компонентов для предотвращения контакта с корпусом и облегчения вентиляции.
Форма корпуса должна предусматривать плавные закругления на углах с радиусом 8–10 мм, что снижает утомляемость при длительном использовании. Вес собранного пульта не должен превышать 150 грамм для сохранения мобильности и комфортного удержания. В местах соприкосновения с ладонью рекомендуется добавить тонкий слой вспененного материала толщиной 2–3 мм для амортизации и улучшения сцепления.
Настройка частоты и каналов связи для надежной работы

Для устойчивой работы радиоуправляемой машинки важно правильно выбрать и настроить частоту передачи сигнала. Частотный диапазон обычно варьируется от 27 МГц до 2,4 ГГц. Выбор зависит от возможностей используемых радиомодулей и условий эксплуатации.
- 27 МГц и 49 МГц – устаревшие диапазоны с узким набором каналов, уязвимы к помехам от бытовых устройств.
- 2,4 ГГц – современный диапазон с широким спектром частот и автоматическим выбором свободного канала.
Для самодельных пультов рекомендуются модули с поддержкой частот 2,4 ГГц, поскольку они обеспечивают:
- большое количество каналов (до 80 и более);
- устойчивость к внешним помехам за счет технологии FHSS или DSSS;
- высокую дальность связи (до 100–200 метров в открытом пространстве).
Настройка каналов включает несколько этапов:
- Выбор канала вручную или автоматический сканирование спектра для выявления наименее загруженного диапазона.
- Фиксация выбранного канала на передатчике и приемнике, чтобы избежать рассогласования.
- Проверка наличия помех на выбранной частоте путем тестовой передачи с разными расстояниями.
- Регулировка мощности сигнала, чтобы минимизировать влияние помех и сохранить энергию аккумулятора.
Рекомендуется использовать радиомодули с возможностью программной смены каналов и встроенной функцией подавления помех. Для повышения надежности связи в условиях сильных помех можно применить двухчастотное переключение или настроить защитное кодирование данных.
Проверка работы пульта и устранение возможных неисправностей
Для проверки работоспособности пульта управления сначала убедитесь, что источник питания подает стабильное напряжение, соответствующее техническим характеристикам – обычно 9 В для радиочастотных модулей. Используйте мультиметр для измерения напряжения на контактах аккумулятора или батарейного отсека.
Далее проверьте работу передатчика: подключите светодиод к выходу кнопок пульта – при нажатии на кнопку он должен мигать, сигнализируя о передаче команды. Если светодиод не реагирует, проверьте целостность пайки и исправность переключателей.
Используйте радиочастотный анализатор или осциллограф для проверки выхода сигнала. Частота должна совпадать с частотой приемника, обычно 27 МГц или 433 МГц. Если осциллограф не фиксирует сигнал, замените модуль передатчика.
При отсутствии связи с радиомашинкой убедитесь в правильности подключения приемника: проверьте напряжение питания, а также целостность проводов от приемника к плате управления. Контакты должны быть припаяны без холодных пайок, провода – без повреждений.
Если приемник не реагирует на команды, выполните сброс настроек приемника (если предусмотрено) и перепроверьте схему подключения согласно документации. Обратите внимание на совпадение частот и кодов передачи между пультом и приемником.
При нестабильной работе или пропадании сигнала в радиусе действия проведите тест в условиях отсутствия внешних радиопомех и препятствий. Помехи могут вызывать снижение качества сигнала и ложные срабатывания.
В случае механических повреждений кнопок замените переключатели. Используйте мультиметр в режиме проверки сопротивления, чтобы убедиться в отсутствии замыканий или обрывов внутри кнопок.
Если после всех проверок проблемы сохраняются, протестируйте каждый элемент схемы по отдельности: источник питания, передатчик, приемник, управляющие элементы. Это позволит локализовать неисправность и оперативно её устранить.
Оптимизация питания пульта и продление времени работы от батарей

Микроконтроллер должен работать в режиме пониженного энергопотребления (sleep mode) с отключением периферии, когда пульт неактивен. Это снижает ток потребления до 10–20 мкА. Для управления переходами между режимами рекомендуются аппаратные прерывания, например, от кнопок или датчиков движения.
Радиомодуль – один из самых энергоёмких элементов. Использование модулей с поддержкой режима энергосбережения, таких как NRF24L01+, позволяет снизить ток потребления в режиме ожидания до 900 нА. Передача данных стоит оптимизировать за счёт сокращения длительности и частоты пакетов, используя протокол с короткими пакетами и низкой скоростью передачи.
Питание периферии следует реализовать через линейные стабилизаторы с низким падением напряжения (LDO) или DC-DC преобразователи с КПД выше 85%. Второй вариант предпочтителен при работе от Li-ion аккумуляторов, так как позволяет поддерживать стабильное напряжение даже при снижении уровня заряда.
Рекомендуется также минимизировать потребление подсветки кнопок и индикаторов. Использование светодиодов с низким током и управление яркостью через широтно-импульсную модуляцию (ШИМ) позволяет снизить расход энергии без потери читаемости.
Для контроля состояния батареи следует внедрить функцию измерения напряжения аккумулятора с последующим переходом пульта в энергосберегающий режим при снижении напряжения ниже порогового значения (обычно 3,3 В для Li-ion). Это предотвратит глубокий разряд и продлит общий срок службы аккумулятора.
Вопрос-ответ:
Какие основные компоненты нужны для сборки пульта управления радиомашинкой своими руками?
Для создания пульта управления потребуются такие элементы, как микроконтроллер или радиопередатчик, источник питания (например, батарейки), кнопки или джойстик для управления, а также корпус для размещения всех деталей. Также потребуется приемник, который устанавливается на радиомашинку, чтобы принимать сигналы с пульта.
Как подключить кнопки к микроконтроллеру, чтобы управлять движением машины?
Кнопки подключаются к входным пинам микроконтроллера. При нажатии на кнопку цепь замыкается, и микроконтроллер считывает это изменение состояния. В программном обеспечении необходимо прописать обработку этих сигналов, чтобы при нажатии соответствующая команда передавалась на радиомашинку — например, движение вперед или поворот.
Можно ли использовать готовые модули радиоуправления, чтобы упростить сборку пульта?
Да, существуют готовые радиомодули, которые уже имеют встроенные передатчики и приемники. Они значительно сокращают время на разработку и минимизируют необходимость в сложной настройке. Использование таких модулей позволяет сосредоточиться на программировании и дизайне корпуса, а не на разработке радиочастотной части.
Как обеспечить устойчивую связь между пультом и радиомашинкой на расстоянии нескольких метров?
Для стабильной связи важно правильно подобрать радиочастоту и мощность передатчика. Кроме того, следует избегать помех — располагать антенны в открытом пространстве, использовать качественные модули и проверять уровень сигнала. В некоторых случаях помогает установка антенны с увеличенным коэффициентом усиления.
Какие ошибки чаще всего допускают при создании пульта управления, и как их избежать?
Частые ошибки — неправильное подключение элементов, слабая пайка, отсутствие защиты от помех и недостаточное тестирование программного кода. Чтобы избежать проблем, нужно внимательно изучить схемы, использовать качественные компоненты, проверить надежность соединений и постепенно тестировать функционал на каждом этапе сборки.
Какие основные компоненты нужны для создания пульта управления радиомашинкой своими руками?
Для изготовления пульта управления потребуются несколько ключевых элементов: микроконтроллер или плата управления (например, Arduino или аналог), радиопередатчик и радиоприемник, кнопки или джойстик для управления движением, аккумулятор или батарея, а также корпус для удобства использования. Кроме того, понадобится базовое оборудование для пайки и подключения проводов. Важно правильно выбрать радиочастоты и убедиться в совместимости передатчика и приемника, чтобы обеспечить стабильную связь между пультом и машинкой.
Какие сложности могут возникнуть при самостоятельной сборке пульта и как их избежать?
Одной из главных трудностей является настройка радиосвязи между пультом и машинкой — проблемы с помехами или недостаточной дальностью могут снизить качество управления. Чтобы избежать этого, стоит использовать проверенные радиомодули и тщательно распаять соединения, чтобы исключить плохие контакты. Также возможны ошибки в программировании микроконтроллера, что приведёт к некорректной работе кнопок или рычагов. Для решения рекомендуется использовать готовые библиотеки и тестировать каждый этап отдельно. Наконец, важно продумать удобство размещения элементов в корпусе, чтобы пульт было комфортно держать и управлять.





