

Шаговый двигатель – это электромеханическое устройство, преобразующее электрические импульсы в дискретные угловые перемещения ротора. В отличие от классических двигателей постоянного тока, шаговый мотор вращается не непрерывно, а по заданным шагам, что делает его незаменимым в системах, где требуется точное позиционирование без обратной связи.
Применение шаговых двигателей охватывает 3D-принтеры, ЧПУ-станки, манипуляторы и медицинское оборудование. Например, в настольном фрезере шаговый двигатель обеспечивает перемещение рабочей головы с точностью до 0,01 мм. Это достигается благодаря высокой разрешающей способности: стандартный шаг – 1,8°, а с микрошаговым режимом – до 0,0225°.
Выбор подходящего двигателя зависит от требуемого момента, скорости и точности. При нагрузке до 0,5 Н·м эффективно применяются гибридные шаговые двигатели NEMA 17. Для более мощных задач – NEMA 23 и выше. Важно учитывать инерцию нагрузки и использовать демпфирующие механизмы при резких изменениях направления движения.
Эффективность системы определяется не только мотором, но и драйвером управления. Современные драйверы с режимами microstepping позволяют добиться плавности хода и снижения вибраций. Без корректного подбора параметров тока и деления шага точность позиционирования теряется, а двигатель перегревается или вибрирует.
Принцип работы шагового двигателя на примерах
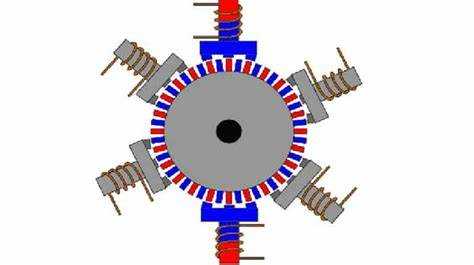
Шаговый двигатель выполняет движение с дискретным углом поворота ротора при подаче управляющих импульсов на обмотки. Пример: при шаге 1,8° требуется 200 импульсов для полного оборота. Угол шага зависит от конструкции: количество зубцов статора и ротора, тип обмотки (униполярная, биполярная).
В 3D-принтере шаговый двигатель используется для перемещения печатающей головки. При шаге 1,8° и микрошаговом драйвере 1/16, минимальное перемещение составляет 0,1125°. Это обеспечивает высокую точность позиционирования без использования обратной связи.
Для повышения плавности используют микрошаговый режим, при котором ток в обмотках изменяется по синусоидальному закону. Это особенно важно в робототехнике, где резкие движения недопустимы. Например, при управлении суставом манипулятора двигатель с шагом 0,9° в микрошаговом режиме способен выполнять до 800 шагов на оборот, обеспечивая высокую точность и мягкость перемещения.
Типы шаговых двигателей и различия в применении
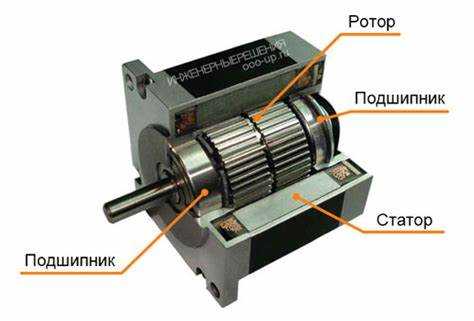
Шаговые двигатели делятся на три основных типа: реактивные, с постоянными магнитами и гибридные. Каждый из них отличается конструкцией, характеристиками вращения и областью применения.
Реактивные шаговые двигатели имеют простой ротор без намагниченных элементов и работают за счёт изменения индуктивности при вращении. Они дешевле в производстве и лучше подходят для высокочастотных приложений с малой нагрузкой, например, в системах воздушного позиционирования и лёгких офисных устройствах.
Двигатели с постоянными магнитами обладают хорошим крутящим моментом на низких скоростях. Они широко применяются в простых приводах, например, в механизмах подачи бумаги и бытовых принтерах. Их недостаток – ограниченная точность по сравнению с гибридными аналогами.
Гибридные шаговые двигатели объединяют свойства двух предыдущих типов. Они обеспечивают высокую точность позиционирования, плавность хода и высокий крутящий момент. Это делает их оптимальными для ЧПУ-станков, 3D-принтеров, медицинского оборудования и промышленных роботов. Их цена выше, но это оправдано эксплуатационными характеристиками.
При выборе типа двигателя необходимо учитывать рабочую нагрузку, требуемую точность, характеристики питания и ограничение по размеру. Неправильный выбор может привести к перегреву, шуму, пропущенным шагам или недостаточному моменту, особенно при работе в замкнутом пространстве или в непрерывном режиме.
Подключение шагового двигателя к микроконтроллеру
Для точного управления током необходимо настроить ограничение на потенциометре драйвера. При превышении номинального тока обмоток двигатель будет перегреваться, а драйвер – отключаться по защите. Ток рассчитывается по формуле: I = Vref / (8 × Rsense).
Минимальная задержка между импульсами STEP должна быть не менее 2 мкс. Частота импульсов определяет скорость вращения. Для микрошагового режима устанавливаются соответствующие уровни на входах MS1–MS3 драйвера.
Важно учитывать индуктивность обмоток: при высоких скоростях без достаточного напряжения двигатель теряет шаги. Рекомендуется использовать питание на 12–24 В с учётом характеристик конкретной модели двигателя.
При программировании желательно применять аппаратные таймеры или функции PWM для стабильной генерации сигналов, избегая программных задержек, создающих неточности.
Выбор драйвера для шагового двигателя по характеристикам
Подбор драйвера для шагового двигателя должен опираться на конкретные электрические и функциональные параметры двигателя. Игнорирование даже одного из них может привести к нестабильной работе, перегреву или отказу системы.
- Ток фазы: драйвер должен обеспечивать номинальный ток, указанный в характеристиках двигателя. Если ток ниже – двигатель недополучит крутящий момент; выше – возникнет перегрев. Например, для двигателя с током 2.1 А необходим драйвер с возможностью настройки не менее 2.1 А RMS или 3 А peak.
- Напряжение питания: рабочее напряжение драйвера должно соответствовать диапазону, в котором двигатель сохраняет стабильную работу. Для низковольтных двигателей (до 12 В) подходят драйверы типа A4988. Для двигателей с рабочим напряжением 24–48 В – более мощные модели, например, DM542 или TB6600.
- Тип управления: если используется микрошаговое управление, драйвер должен поддерживать требуемую дискретизацию: 1/8, 1/16, 1/32 и более. Это критично при использовании в прецизионных системах позиционирования.
- Интерфейс управления: выбор зависит от контроллера. Большинство драйверов используют STEP/DIR, но существуют модели с поддержкой UART, SPI или CAN, например, драйверы серии TMC от Trinamic.
- Защиты: наличие защиты от перегрева, перегрузки и короткого замыкания критично при работе в промышленных условиях. Недорогие драйверы этим часто не оснащаются.
- ШИМ-управление: драйверы с токовым ШИМ (Chopper) позволяют добиться лучшей динамики. Обращайте внимание на тип Chopper-контроля: например, SpreadCycle обеспечивает более тихую работу по сравнению с Fast Decay.
- Форм-фактор и охлаждение: для компактных систем предпочтительны драйверы в формате платы (stepstick), но при токах выше 2 А обязательно наличие радиатора или активного охлаждения.
Идеальное соответствие драйвера и двигателя достигается не по одному параметру, а по их совокупности. Невозможно использовать один универсальный драйвер для всех двигателей – каждый случай требует отдельного расчёта.
Реализация точного позиционирования с помощью шагового двигателя
Шаговые двигатели обеспечивают дискретное перемещение ротора, что позволяет точно контролировать угол поворота без обратной связи. Один шаг обычно составляет 1.8° (200 шагов на оборот), но при использовании микрошагового режима разрешение может достигать 0.225° или более, в зависимости от драйвера и схемы управления.
Для достижения высокой точности необходимо использовать драйверы с поддержкой микрошагов, например, DRV8825 или TMC2209. Они уменьшают вибрации и улучшают плавность хода, что критично для задач, требующих позиционирования с точностью до десятков микрометров.
Точность позиционирования зависит от механических люфтов, качества редуктора и прочности креплений. Использование прецизионных шарико-винтовых пар и компенсация механического зазора существенно повышают итоговую точность. Следует учитывать тепловое расширение деталей, особенно при работе в промышленной среде.
Контроль положения реализуется через счёт шагов: при правильной настройке системы каждое поступившее импульсное напряжение гарантирует строго определённый сдвиг. Для предотвращения пропусков шагов важен точный расчет момента нагрузки и выбор двигателя с запасом крутящего момента не менее 30% от расчётной нагрузки.
Рекомендуется реализовать плавный разгон и торможение с помощью профилей ускорения, что снижает инерционные нагрузки и исключает потерю шагов. Для этого применяются алгоритмы типа S-кривой или трапецеидального профиля, поддерживаемые современными контроллерами, такими как STM32 или Arduino с GRBL.
Распространённые ошибки при использовании шаговых двигателей

Недостаточный ток драйвера – ещё одна причина потери шага. При слишком низком токе обмоток двигатель не развивает необходимый момент, что вызывает пропуски шагов и вибрации. Ток нужно настраивать согласно паспортным данным, учитывая тип нагрузки и условия работы.
Неправильное подключение фаз обмоток вызывает некорректное вращение и перегрев. Следует строго соблюдать схему подключения, указанную производителем, и проверять полярность перед запуском.
Отсутствие механического демпфирования при работе с высоким ускорением ведёт к резонансам и вибрациям. Использование демпферов или корректировка профиля движения снижает динамические нагрузки и увеличивает ресурс двигателя.
Игнорирование теплового режима приводит к перегреву и выходу из строя. Рекомендуется контролировать температуру двигателя и обеспечивать достаточный теплоотвод, особенно при длительной работе на предельных режимах.
Неправильная настройка скорости и ускорения часто становится причиной пропуска шагов. Следует тщательно подбирать параметры профиля движения с учётом инерционных свойств механизма и характеристик двигателя.
Вопрос-ответ:
Что такое шаговый двигатель и для чего он применяется?
Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в точные угловые перемещения ротора. Его используют там, где требуется точное позиционирование или контроль скорости, например, в принтерах, станках с числовым программным управлением, робототехнике и различных автоматических устройствах.
Чем шаговый двигатель отличается от обычного электродвигателя?
В отличие от классического электродвигателя, шаговый двигатель перемещается не плавно, а шагами — с определённым угловым шагом. Это позволяет точно контролировать положение вала без использования датчиков обратной связи, что упрощает управление и повышает точность при выполнении задач позиционирования.
Какие основные типы шаговых двигателей существуют и как они различаются?
Существуют несколько видов шаговых двигателей, включая гибридные, с постоянными магнитами и реактивные. Гибридные обычно обеспечивают более высокую точность и крутящий момент, постоянномагнитные — проще и дешевле, а реактивные имеют особую конструкцию ротора и подходят для определённых применений. Выбор зависит от требований к точности, скорости и нагрузке.
Какие преимущества шагового двигателя в системах управления положением?
Главное достоинство — возможность перемещения вала с заданным угловым шагом без сложных датчиков. Это упрощает конструкцию и снижает затраты на систему. Кроме того, шаговые двигатели обладают хорошей устойчивостью к перегрузкам и быстрым откликом на управляющие сигналы, что позволяет точно и быстро менять положение вала.
Как правильно выбрать шаговый двигатель для конкретной задачи?
При выборе учитывают несколько факторов: необходимый крутящий момент, точность позиционирования, скорость вращения и условия эксплуатации. Важно определить размер шага, тип двигателя, а также совместимость с контроллером. Кроме того, стоит оценить требования к нагрузке и режим работы, чтобы обеспечить стабильную и надёжную работу устройства.





