Гироскутер – это не просто средство передвижения, а потенциальная платформа для инженерных экспериментов. Если устройство потеряло актуальность или не используется по назначению, его можно превратить в нечто более функциональное: электрокарт, гусеничный вездеход, мини-самокат или даже автономную тележку для перевозки грузов.
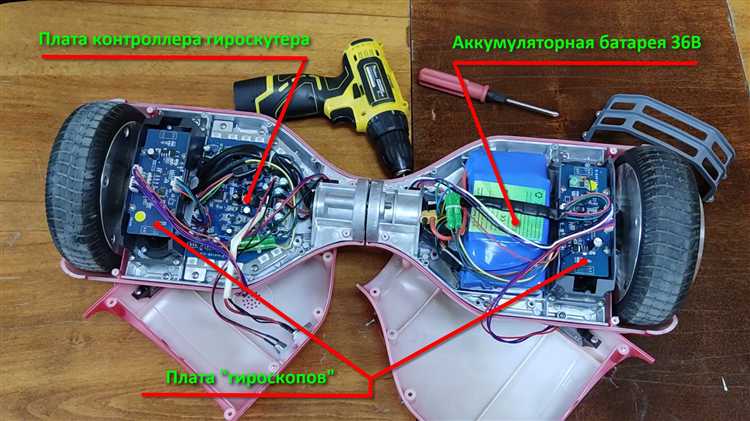
Базовая плата гироскутера содержит контроллер, способный работать с двумя мотор-колесами и гироскопами, что делает его отличной основой для самодельного транспортного средства. Используя Arduino или Raspberry Pi в связке с Bluetooth-модулем, можно интегрировать дистанционное управление. Многие используют штатные мотор-колёса 6.5 или 8 дюймов, так как они обладают достаточной мощностью (до 350 Вт на каждое колесо) и встроенными датчиками Холла.
Один из популярных вариантов переделки – создание электрического мини-карта. Для этого потребуется изготовить раму из металлического профиля, перенести мотор-колеса на заднюю ось и подключить аккумулятор через контроллер. В качестве рулевого управления можно использовать простой механический привод с передней поворотной осью. Необходима обязательная переработка системы питания: большинство гироскутеров оснащены аккумуляторами 36 В, поэтому при добавлении внешних нагрузок важно учитывать токовые ограничения BMS-платы.
Для внедрения гусеничного привода можно использовать части от детского снегохода или купить готовый комплект гусениц. Колёса гироскутера крепятся к боковинам платформы, а на оси надеваются ведущие шестерни. Важно правильно рассчитать передаточное число, иначе моторы перегреются или не смогут обеспечить достаточную тягу.
Переделка гироскутера – не только способ дать ему вторую жизнь, но и отличная возможность применить практические навыки в электромеханике, программировании и проектировании. Главное – соблюдать правила безопасности, особенно при работе с литиевыми аккумуляторами и высокими токами.
Как превратить гироскутер в самодельный электросамокат

Для переделки гироскутера в электросамокат потребуется разобрать корпус и извлечь обе мотор-колесные секции с управляющей электроникой. Обычно платы управления размещены в одной из половин корпуса – важно аккуратно отсоединить все разъёмы, запоминая схему подключения.
К каждой мотор-колесной части нужно прикрепить жесткую ось или вилку, на которой будет держаться платформа самоката. Ось изготавливается из стальной трубы диаметром не менее 25 мм и длиной около 50 см. Она должна надёжно соединять два мотор-колеса и выдерживать вес ездока.
Далее из фанеры или алюминия вырезается платформа – основа для ног. Рекомендуемые размеры: 50–60 см в длину, 15–20 см в ширину. К ней крепится ось с колёсами. Для дополнительной прочности соединения используют болтовое соединение с закладными шайбами.
Питание остаётся штатным – аккумулятор гироскутера (обычно 36 В, 4.4 А·ч), устанавливается под платформой в жёстком герметичном корпусе. При необходимости – добавляется внешний выключатель и разъём для зарядки.
Важно: соблюдай баланс веса и симметрию конструкции. Тестируй собранную раму без подключения электроники, чтобы убедиться в надёжности и устойчивости. После полной сборки проверяй все контакты и проводку на наличие коротких замыканий до включения.
Результат – полноценный электросамокат с мотор-колёсами и заводским контроллером, адаптированный под ручное управление и жесткую платформу.
Установка сиденья и рулевого управления на гироскутер
Выбор сиденья: оптимальный вариант – велосиденье с амортизатором. Оно снижает вибрации и легко адаптируется к конструкции. Необходимо выбрать модель с крепёжной штангой диаметром 25–28 мм. Это упростит установку на платформу через металлический адаптер.
Крепление: фиксируйте штангу к платформе с помощью U-образных болтов и монтажной пластины толщиной не менее 3 мм. Используйте болты М6 с нейлоновыми гайками для надёжной фиксации. Перед сверлением разметьте точки с учётом центра тяжести, чтобы избежать неустойчивости при движении.
Рулевое управление: подойдёт телескопическая труба от складного самоката. Верхнюю часть оснащают Т-образной ручкой с прорезиненными грипсами. Нижнюю – поворотным шарниром, соединяющим трубу с адаптером, прикреплённым к корпусу гироскутера. Жёсткое соединение запрещено: шарнир необходим для компенсации наклонов платформы.
Совет: для дополнительной безопасности установите страховочный ремень между рулём и рамой. Он предотвратит поломку креплений при резких манёврах.
Переделка гироскутера в гусеничный вездеход

Перед началом переделки необходимо демонтировать штатные колёса гироскутера, оставив мотор-колёса и управляющую электронику. Далее потребуется изготовить раму под гусеничный модуль. Оптимальный материал – стальной профиль 25×25 мм с толщиной стенки 2 мм. Рама должна обеспечивать жёсткую фиксацию мотор-колёс и направляющих роликов для гусеницы.
Гусеницы можно собрать из резиновой транспортёрной ленты шириной 100–120 мм и толщиной 8–10 мм. Для повышения сцепления с грунтом в ленту через каждые 10–15 см врезаются поперечные траки из алюминиевого уголка. Края ленты соединяются стальными скобами и болтами М6 с самоконтрящимися гайками.
Ведущими остаются мотор-колёса гироскутера. К ним крепятся ведущие шкивы – самодельные звёздочки или колёса с приваренными захватами под гусеницу. Направляющие ролики устанавливаются на подшипниках и закрепляются на независимых рычагах с амортизаторами от детского велосипеда для компенсации неровностей.
Система питания остаётся штатной, но желательно увеличить теплоотвод, установив алюминиевые радиаторы на контроллер. Управление осуществляется как на обычном гироскутере – переносом веса, однако при необходимости можно установить рукоятки с датчиками наклона или переделать управление под джойстик с Arduino.
Масса переделанного вездехода возрастает до 18–22 кг, что требует усиления корпуса гироскутера. Все элементы должны быть герметизированы для защиты от влаги и грязи. Тестирование проводится на мягком грунте, после чего возможна регулировка натяжения гусениц и развала роликов.
Интеграция гироскутера в корпус радиоуправляемой платформы

Для создания радиоуправляемой платформы с приводом от гироскутера необходимо извлечь основные компоненты: мотор-колёса, плату управления и аккумулятор. Корпус гироскутера разбирается, моторы освобождаются от декоративных элементов, но сохраняются провода и разъёмы. При демонтаже важно не повредить магнитные датчики Холла – они обеспечивают точную работу моторов.
Для установки моторов в новое шасси используют металлические кронштейны или 3D-печатные держатели. Моторы крепятся жёстко, с учётом их массы и крутящего момента. Минимальное расстояние между осями – 20 см для устойчивости. Диаметр колёс гироскутера – 6,5 или 10 дюймов – влияет на клиренс платформы.
Плата гироскутера требует доработки: нужно отключить гиродатчики и заменить штатную систему управления на внешнюю, совместимую с радиоуправлением. Для этого используют контроллеры типа Hoverboard Control Board с поддержкой PWM-сигнала или UART. Альтернатива – перепрошивка оригинальной платы (например, через STM32 и проект Hoverboard Firmware Hack).
Управление реализуется через Arduino, Raspberry Pi или аналогичные микроконтроллеры с передатчиком 2.4 ГГц. Радиоприёмник подключается к контроллеру моторов, обеспечивая независимое управление каждым колесом. Для повышения точности стоит настроить плавную акселерацию и ограничение скорости.
Аккумулятор гироскутера (обычно 36В, 4.4А·ч) монтируется в центр шасси для равновесия. Для защиты используют плату BMS и корпус с вентиляцией. При необходимости увеличения времени работы можно параллельно подключить второй аккумулятор с идентичными характеристиками.
Результат – компактная, мощная платформа с разворотом на месте и высокой проходимостью. Её можно использовать для робототехники, видеосъёмки или транспортировки грузов весом до 100 кг.
Замена аккумулятора на более мощный: пошаговая инструкция

Шаг 1: Подбор совместимого аккумулятора
Выбирайте Li-ion аккумулятор с напряжением, идентичным штатному (обычно 36 В), но с большей ёмкостью – например, 10 Ач вместо 4,4 Ач. Обратите внимание на форму и габариты, чтобы он помещался в штатный отсек. Поддержка BMS с защитой от перезаряда, переразряда и короткого замыкания обязательна.
Шаг 2: Разборка гироскутера
Открутите все винты на нижней крышке корпуса. Снимите крышку аккуратно, не повредив провода. Зафиксируйте расположение компонентов для последующей сборки (сделайте фото).
Шаг 3: Демонтаж старого аккумулятора
Отключите разъёмы питания и сигнального провода от старой батареи. Приклеенные элементы аккуратно отделите, не повредив крепёж и проводку. Удалите старый аккумулятор из корпуса.
Шаг 4: Установка нового аккумулятора
Разместите новый аккумулятор в отсеке, убедившись в надёжной фиксации. При необходимости используйте липучку или поролоновые прокладки для предотвращения вибраций. Подключите разъёмы, соблюдая полярность. Если разъёмы несовместимы, выполните пайку с термоусадочной изоляцией и использованием канифоли и олова. Не допускайте оголённых проводов.
Шаг 5: Проверка работоспособности
Перед сборкой включите гироскутер и проверьте, горит ли индикатор питания. Убедитесь, что колёса реагируют на наклон. При отсутствии отклика проверьте соединения и состояние BMS. Ошибки на дисплее могут указывать на неправильное напряжение или повреждение цепи.
Шаг 6: Сборка корпуса
Закрепите нижнюю крышку, затянув винты равномерно. Убедитесь, что провода не пережаты и находятся на прежних местах. После сборки повторно проверьте включение и устойчивость гироскутера.
Результат: увеличенная ёмкость аккумулятора обеспечит большее время работы без подзарядки, при условии соблюдения всех норм безопасности и совместимости компонентов.
Как подключить гироскутер к Arduino для программируемого управления

Для интеграции гироскутера с Arduino потребуется получить доступ к его внутренним датчикам и контроллерам, чтобы управлять движением через собственный код. Основная задача – считать сигналы с гироскопа и акселерометра и посылать команды на моторы.
- Разбор гироскутера и идентификация контроллера. Снимите корпус, найдите плату управления мотором. Обычно это контроллер с микроконтроллером, управляющий драйверами моторов и принимающий данные с IMU (гироскоп + акселерометр).
- Питание Arduino. Используйте стабилизированный источник 5 В от гироскутера или отдельный аккумулятор. Важно обеспечить общую массу (GND) между Arduino и гироскутером для корректной работы шины данных.
- Чтение данных с датчиков. Используйте готовые библиотеки для Arduino, например, MPU6050 или MPU9250, в зависимости от модели IMU. Настройте частоту чтения 100–200 Гц для плавного управления.
- Управление моторами. Для подачи управляющих сигналов к моторам используйте выходы Arduino, подключённые к драйверам моторов контроллера. Часто требуется подать PWM-сигналы на входы драйверов для регулировки скорости и направления вращения.
- Калибровка и фильтрация. Применяйте фильтр Калмана или комплементарный фильтр для сглаживания данных с гироскопа и акселерометра, чтобы избежать рывков при управлении.
- Программирование алгоритма управления. Реализуйте PID-регулятор для балансировки и поддержания нужного наклона платформы. Используйте данные угла наклона для корректировки мощности на моторы.
В итоге Arduino становится центром управления гироскутером, позволяя программировать индивидуальные реакции и интегрировать дополнительные функции, такие как дистанционное управление или автоматическая стабилизация под заданные параметры.
Вопрос-ответ:
Какие базовые инструменты и материалы понадобятся для самостоятельной переделки гироскутера?
Для переделки устройства пригодятся набор отверток, мультиметр, паяльник с припоем, изолента, а также дополнительные компоненты — например, новые колеса, светодиоды, сменный корпус или аккумулятор. Желательно иметь под рукой инструкции или схемы устройства для корректного подключения деталей.
Можно ли увеличить скорость гироскутера, и если да, то каким способом это сделать безопасно?
Скорость можно повысить путём замены моторов на более мощные или изменения параметров контроллера. Однако такой тюнинг требует знаний в электронике, чтобы избежать перегрева и повреждения. Рекомендуется одновременно улучшить систему охлаждения и проверить качество креплений, чтобы сохранить стабильность и безопасность при движении.
Какие идеи для улучшения внешнего вида гироскутера наиболее популярны среди любителей переделок?
Часто делают замену корпуса на яркие пластиковые панели с необычными текстурами или светящимися элементами. Добавляют декоративную подсветку с помощью светодиодных лент, что создаёт эффектный вид в тёмное время суток. Некоторые также меняют колёса на цветные или с рисунками, чтобы сделать устройство уникальным.
Как можно увеличить время работы гироскутера без значительного увеличения веса?
Для увеличения автономности стоит установить более ёмкий аккумулятор с высокой плотностью энергии. При этом важно сохранить баланс веса и объёма, чтобы устройство не стало громоздким. Иногда используют литий-ионные батареи с улучшенной схемой управления зарядом, что помогает максимально эффективно использовать заряд.
Какие меры безопасности нужно соблюдать при самостоятельном вмешательстве в электронику гироскутера?
Перед началом работы нужно отключить питание и убедиться, что батарея полностью разряжена. Все операции с пайкой должны выполняться в проветриваемом помещении, используя средства защиты. Важно не перепутать полярность проводов и тщательно изолировать соединения, чтобы избежать коротких замыканий и возгораний. После сборки рекомендуется провести тесты на небольшой скорости.