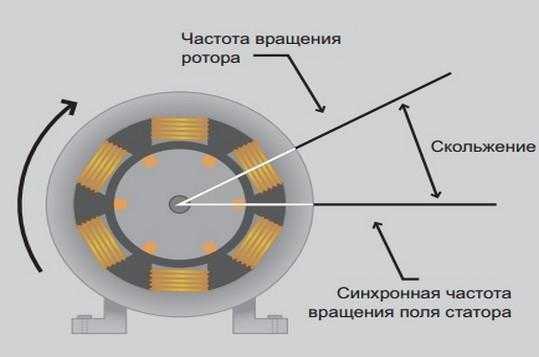
Скольжение асинхронного двигателя – это разница между его синхронной и фактической угловой скоростью. Оно представляет собой ключевой параметр, определяющий эффективность работы машины и её взаимодействие с сетью. Скольжение выражается в процентах и изменяется в зависимости от нагрузки, частоты питающего тока и конструктивных особенностей мотора. Чем меньше скольжение, тем выше КПД, однако на практике оно всегда присутствует, так как полное отсутствие скольжения привело бы к отсутствию момента на валу двигателя.
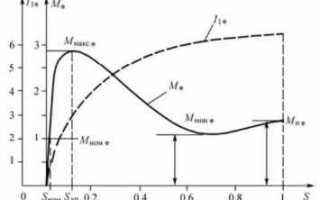
Определение скольжения происходит по формуле: s = (n_s — n) / n_s, где s – коэффициент скольжения, n_s – синхронная скорость, n – фактическая скорость вращения ротора. При номинальных режимах работы скольжение асинхронного двигателя обычно не превышает 5-7%. Однако при увеличении нагрузки на двигатель скольжение увеличивается, что снижает его эффективность и может привести к перегреву.
Понимание скольжения важно при проектировании и эксплуатации асинхронных двигателей, особенно в системах с переменной нагрузкой. Для поддержания оптимальной работы и предотвращения перегрузки следует регулярно контролировать параметры скольжения, а также применять системы регулировки частоты тока (частотные преобразователи), которые позволяют точно управлять моментом и скоростью вращения.
Влияние скольжения на параметры мощности асинхронного двигателя
Скольжение асинхронного двигателя играет ключевую роль в определении его рабочих характеристик, включая мощность. Это параметр, который непосредственно влияет на эффективность преобразования электрической энергии в механическую. Мощность двигателя зависит от значения скольжения, которое определяется разницей между синхронной и фактической частотами вращения ротора.
Когда скольжение двигателя увеличивается, мощность, передаваемая на вал, также возрастает, однако эффективность работы значительно снижается. Это связано с увеличением потерь на слое ротора и в статоре. В частности, потери в железе и меди, а также дополнительные тепловые потери, возрастают пропорционально скольжению. На практике для большинства двигателей скольжение в пределах 1-6% является оптимальным, так как это минимизирует потери и обеспечивает максимальную механическую мощность при хорошей эффективности.
При низком скольжении (менее 1%) двигатель работает с минимальными потерями, но отдача мощности существенно снижается. Это связано с тем, что при низких значениях скольжения электрическая энергия в основном не преобразуется в механическую, а уходит в виде потерь в проводах и магнитном поле. С другой стороны, увеличение скольжения выше 6% приводит к перегрузке двигателя, росту тепловых потерь и ухудшению долговечности агрегата.
Чтобы достичь максимальной мощности при оптимальном скольжении, следует учитывать рабочие условия и нагрузку на двигатель. Для двигателей с регулируемой частотой вращения, таких как частотно-регулируемые приводы (ЧРП), можно более точно контролировать скольжение, что позволяет значительно улучшить характеристики мощности и обеспечить более высокую энергоэффективность при различных нагрузках.
Оптимизация скольжения требует внимательного подхода к настройке параметров двигателя и контроля за его температурным режимом. Часто используются системы автоматического регулирования, которые позволяют поддерживать скольжение на оптимальном уровне в реальных условиях эксплуатации, минимизируя потери и повышая КПД двигателя.
Как изменение скольжения влияет на токи в обмотках статора
Скольжение асинхронного двигателя (S) характеризует разницу между синхронной и фактической скоростью ротора. Это ключевой параметр, напрямую влияющий на токи в обмотках статора. В процессе работы двигателя скольжение изменяется в зависимости от нагрузки, что вызывает изменения в токах, протекающих через обмотки статора.
При увеличении скольжения нагрузка на двигатель возрастает. Это приводит к следующему:
- Увеличение тока статора. При большем скольжении (особенно при высоких нагрузках) индукция магнитного потока возрастает, что ведет к повышению тока в обмотках статора для создания необходимого магнитного поля.
- Изменение формы тока. С увеличением скольжения ток в обмотках статора становится менее синусоидальным, что может привести к гармоническим и повышению потерь.
- Увеличение потерь мощности. При увеличении скольжения увеличиваются потери мощности в обмотках статора, так как с ростом тока растет и сопротивление проводников, приводящее к дополнительным потерям тепла.
При уменьшении скольжения происходит следующее:
- Снижение тока статора. При уменьшении скольжения мощность, потребляемая двигателем, уменьшается, что ведет к снижению тока в обмотках статора.
- Уменьшение потерь. С меньшим током в обмотках статора снижаются потери на нагрев, что повышает общую эффективность работы двигателя.
Таким образом, токи в обмотках статора изменяются в зависимости от значения скольжения. Для достижения оптимальной работы асинхронного двигателя важно поддерживать скольжение в пределах, которые соответствуют максимально возможной нагрузке при минимальных потерях.
Определение оптимального скольжения для максимальной производительности двигателя
Скольжение, равное нулю, наблюдается при идеальной синхронной работе двигателя, однако в реальных условиях его значение всегда больше нуля. Наиболее эффективный режим работы двигателя заключается в поддержании скольжения в пределах 2-6% от синхронной скорости, что позволяет минимизировать потери в статоре и роторе.
Максимальная производительность асинхронного двигателя достигается при скольжении в 2-3%. При этом мощность, передаваемая на вал, будет максимальной, а потери в виде тепла будут минимальными. Это обусловлено тем, что при меньшем скольжении величина магнитного потока в роторе остается достаточно высокой, обеспечивая эффективное преобразование энергии.
При повышении скольжения выше 6% эффективность падает из-за увеличения потерь в обмотках ротора и повышенной тепловой нагрузки, что может привести к перегреву и снижению срока службы двигателя. Таким образом, поддержание скольжения в оптимальном диапазоне – это важнейшая задача для эксплуатации асинхронных двигателей в промышленности.
Для определения оптимального скольжения можно использовать методы динамического моделирования или эмпирические данные, основанные на характеристиках конкретной модели двигателя и условиях эксплуатации. Важно учитывать нагрузки на двигатель, тип приводного механизма и условия работы (температурные колебания, изменение напряжения и т. д.).
Кроме того, для повышения эффективности работы двигателя необходимо контролировать параметры, влияющие на скольжение, такие как напряжение питания и частота вращения. Регулировка этих параметров с помощью частотных преобразователей позволяет поддерживать оптимальное скольжение в реальном времени, что способствует повышению производительности.
Методы регулирования скольжения в асинхронных двигателях
1. Изменение частоты питающего тока
Один из основных способов регулирования скольжения – изменение частоты питающего тока. Это позволяет регулировать синхронную скорость вращения магнитного поля, что влияет на скорость ротора и, соответственно, скольжение. Методы изменения частоты тока включают использование частотных преобразователей.
- Преимущества: высокая точность регулировки, экономия энергии за счет оптимального управления.
- Недостатки: высокая стоимость оборудования, необходимость в специализированных устройствах.
2. Регулирование напряжения на статоре
Изменение напряжения питания асинхронного двигателя изменяет амплитуду магнитного поля, что в свою очередь влияет на скорость и скольжение ротора. Этот метод используется в системах с постоянной частотой тока, где изменение напряжения становится единственным способом регулировки.
- Преимущества: простота реализации, низкая стоимость.
- Недостатки: ограниченные возможности для точного регулирования скорости.
3. Регулирование нагрузки на двигатель
Изменение нагрузки на асинхронный двигатель также влияет на его скольжение. При увеличении нагрузки скольжение растет, что может приводить к повышенному расходу энергии и снижению эффективности работы. В некоторых случаях используется обратная связь для поддержания оптимального соотношения нагрузки и скольжения.
- Преимущества: простой и экономичный способ регулирования.
- Недостатки: низкая точность и невозможность регулировки в реальном времени без дополнительного оборудования.
4. Использование фазных сдвигов в питании
Метод заключается в изменении фазового сдвига между токами, подаваемыми на обмотки статора. Это позволяет управлять магнитным полем, а следовательно, и скоростью вращения ротора, что влияет на величину скольжения. Используется для сложных систем с переменной нагрузкой.
- Преимущества: высокая точность регулировки, возможность применения в широком диапазоне нагрузок.
- Недостатки: сложность реализации, высокая стоимость системы управления.
5. Механическое регулирование
Метод включает в себя механическое изменение скорости работы двигателя путем установки редукторов или вариаторов, что позволяет контролировать скольжение в зависимости от конкретных условий эксплуатации. Это особенно эффективно для динамичных процессов с переменной нагрузкой.
- Преимущества: простота управления, высокая надежность.
- Недостатки: механическая сложность и дополнительные затраты на обслуживание.
6. Комбинированные методы

В некоторых случаях наиболее эффективным оказывается комбинированное использование нескольких методов регулирования, например, сочетание изменения частоты тока и регулирования нагрузки. Такой подход позволяет добиться более гибкого и точного контроля над процессами в двигателе.
- Преимущества: высокая гибкость, возможность точного регулирования в широком диапазоне режимов.
- Недостатки: повышенные требования к системе управления, большая стоимость.
Скольжение и его роль в энергоэффективности электроприводов
При высоком скольжении двигатель работает менее эффективно. Процесс скольжения создает дополнительные токи в роторе, что приводит к потерям на сопротивлении и уменьшению коэффициента полезного действия (КПД). Например, при скольжении около 5% КПД может составлять 90–92%, а при 20% – значительно снижается, иногда до 70–75%. Чем меньше скольжение, тем выше КПД и, следовательно, меньше потребление энергии.
Скольжение важно при расчетах режимов работы электроприводов. Для максимальной энергоэффективности важно поддерживать оптимальный баланс скольжения в зависимости от режима работы, таких как пуск, нагрузка и торможение. При запуске двигателя скольжение существенно увеличивается, что влечет за собой значительные пусковые токи и потери. Современные системы регулирования частоты вращения (например, инверторы) позволяют минимизировать пусковые потери и оптимизировать работу в широком диапазоне частот, поддерживая низкий уровень скольжения даже при изменении нагрузки.
Использование частотных преобразователей позволяет добиться более стабильного и эффективного работы двигателя, минимизируя скольжение и тем самым уменьшая потери в трансформаторах, проводах и самом двигателе. В частности, для применения в вентиляторах, насосах и компрессорах, где рабочие характеристики сильно зависят от нагрузки, такие технологии обеспечивают существенное улучшение энергоэффективности.
Для достижения максимальной энергоэффективности в реальных условиях эксплуатации также важно учитывать температурный режим и величину нагрузки на двигатель. При избыточном увеличении нагрузки скольжение будет расти, что вызовет увеличение потерь. Поэтому регулярное обслуживание и точная настройка электроприводов на оптимальное скольжение значительно продлевает срок службы оборудования и снижает операционные расходы.
Таким образом, оптимизация скольжения является важным аспектом повышения энергоэффективности асинхронных двигателей. Интеграция современных методов управления, таких как системы регулирования частоты, позволяет эффективно контролировать скольжение, минимизируя потери и улучшая КПД электроприводов.
Как скольжение связано с перегревом асинхронного двигателя
При скольжении, равном нулю (синхронный режим), двигатель работает с минимальными потерями энергии. С увеличением скольжения ток в обмотках ротора возрастает, что ведет к увеличению потерь на сопротивление. Эта потеря мощности преобразуется в тепло, вызывая перегрев. Если скольжение становится слишком высоким, например, при избыточной нагрузке или неисправности системы управления, температура двигателя может подняться до опасного уровня, что в свою очередь снижает его срок службы.
Кроме того, увеличение скольжения повышает нагрузку на электропитание, так как двигатель начинает потреблять больше тока для поддержания работы. Это дополнительно вызывает перегрев обмоток и может привести к перегрузке источников питания, что также влияет на общую эксплуатационную эффективность системы.
Рекомендуется контролировать скольжение для предотвращения перегрева. Современные системы управления могут автоматически регулировать частоту вращения и нагрузку, минимизируя последствия повышенного скольжения. Для оценки состояния двигателя следует регулярно измерять токи в обмотках, а также температуру корпуса. Важно также следить за состоянием вентиляции и охлаждения устройства, так как недостаточное охлаждение усиливает эффект перегрева при повышенном скольжении.
Таким образом, скольжение и перегрев асинхронного двигателя тесно связаны: высокое скольжение вызывает рост потерь и температуры, что снижает эффективность работы устройства и может привести к его выходу из строя.
Влияние скольжения на шум и вибрации в асинхронных двигателях
Скольжение асинхронного двигателя оказывает значительное влияние на уровень шума и вибрации. С увеличением скольжения, особенно при перегрузках или изменении режима работы, возникают дополнительные механические и электромагнитные воздействия, которые усиливают шум и вибрации. Это связано с изменениями в магнитном поле, а также с колебаниями механических компонентов двигателя.
При скольжении, отличном от номинального, происходит увеличение несимметричности в магнитном потоке, что ведет к появлению гармоник в электрическом и магнитном полях. Эти гармоники, в свою очередь, создают дополнительные механические колебания, которые проявляются в виде шума и вибраций. С увеличением нагрузки скольжение также увеличивается, что способствует увеличению звукового давления.
На низких значениях скольжения (например, при малых нагрузках) двигатель работает в условиях стабильного магнитного поля, что минимизирует уровень шума и вибраций. Однако, с ростом скольжения, влияние асимметрии в магнитном поле становится более выраженным, что приводит к акустическим колебаниям и повышению вибрации.
Вибрации могут быть связаны не только с магнитными колебаниями, но и с механическими нарушениями, такими как дисбаланс ротора или повреждения подшипников. С увеличением скольжения нагрузка на эти элементы возрастает, что также увеличивает уровень вибраций. Особенно это заметно при высоких значениях скольжения, когда двигатель работает в частичном перегрузочном режиме.
Для минимизации шумовых и вибрационных эффектов рекомендуется использовать двигатели с регуляторами частоты вращения. Это позволяет поддерживать скольжение в пределах оптимальных значений, что снижает не только уровень вибраций, но и износ механических частей. Также важным фактором является правильная балансировка ротора и регулярное обслуживание подшипников.
Оптимизация конструкции ротора, использование более качественных материалов и улучшение системы охлаждения также способствует снижению негативного влияния скольжения на шум и вибрации. В современных асинхронных двигателях часто применяются системы с активным управлением скольжением, что позволяет эффективно контролировать уровень акустических и механических колебаний в разных режимах работы.
Вопрос-ответ:
Что такое скольжение в работе асинхронного двигателя и как оно влияет на его характеристики?
Скольжение в асинхронном двигателе — это разница между скоростью вращения магнитного поля статора и реальной скоростью ротора. Это явление важным образом влияет на работу двигателя: чем выше скольжение, тем больше энергия теряется в виде тепла, а эффективность двигателя снижается. Для нормальной работы скольжение должно быть в пределах 1-5% на номинальных режимах работы. Это значение позволяет двигателю выполнять свою задачу с минимальными потерями.
Как скольжение асинхронного двигателя зависит от нагрузки?
Скольжение асинхронного двигателя увеличивается при повышении нагрузки на двигатель. Это связано с тем, что при увеличении нагрузки, ротор замедляется относительно магнитного поля статора, и скольжение растет. В свою очередь, рост скольжения ведет к увеличению тока в обмотках ротора и снижению КПД устройства. Однако, даже при повышенной нагрузке, асинхронный двигатель остается достаточно стабильным в работе, если не превышает критических значений скольжения.
Как можно уменьшить скольжение в асинхронном двигателе?
Для снижения скольжения в асинхронном двигателе важно регулировать его эксплуатацию и нагрузку. Также можно применить различные методы управления, такие как регулирование частоты тока с помощью частотных преобразователей. Это позволяет поддерживать скорость вращения ротора на оптимальном уровне, минимизируя потери энергии и улучшая КПД устройства. Однако, нужно учитывать, что полное устранение скольжения невозможно, так как это свойство асинхронного двигателя.
Как влияет скольжение на экономичность работы асинхронного двигателя?
Скольжение напрямую влияет на экономичность работы асинхронного двигателя. Чем больше скольжение, тем больше потерь энергии в виде тепла, что снижает КПД и увеличивает расход электроэнергии. В нормальных условиях работы, скольжение должно быть минимальным, чтобы обеспечить наиболее экономичную работу двигателя. Для оптимизации потребления энергии важно поддерживать его на уровне, соответствующем нагрузке и условиям эксплуатации. Высокие значения скольжения могут привести к перегреву и повреждению двигателя, что также ухудшает его экономическую эффективность.